官网安装步骤如下:
http://wiki.ros.org/cn/noetic/Installation/Ubuntu#A.2BXwBZy1uJiMU-
第一个:添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
第二个:添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
报错


修改为下面
sudo apt-key adv --keyserver 'hkp://pgp.mit.edu:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
成功

第三个:更新软件源配置以及安装ROS
sudo apt update
sudo apt install ros-melodic-desktop-full
成功
第四个:初始化rosdep
sudo rosdep init
报错:找不到命令
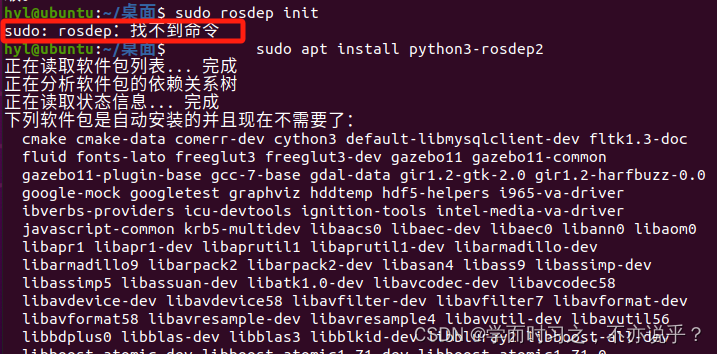
输入如下
sudo apt install python3-rosdep2
rosdep update
如果失败:#打开hosts文件
sudo gedit /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
#保存后退出再尝试
来自:https://blog.csdn.net/u013468614/article/details/102917569
第五个:设置环境变量
20.04Ubuntu对应是noetic,所以是noetic
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
运行脚本让环境变量生效
source ~/.bashrc
第六个:安装ros
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
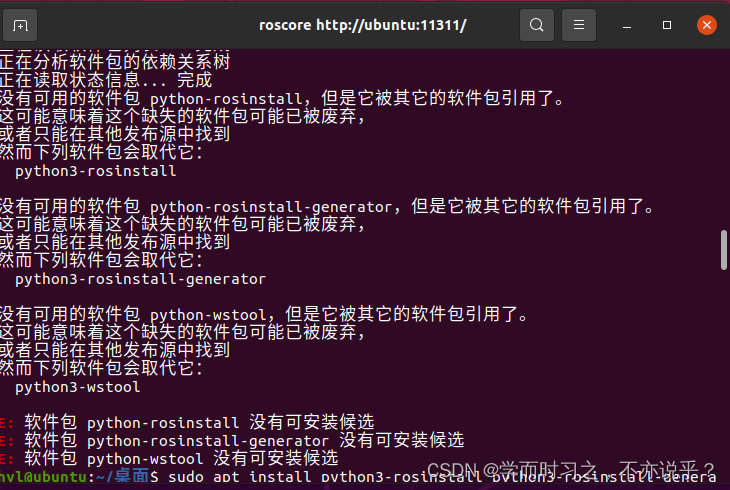
输入
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
表示完成

7检查ros是否安装好
roscore
报这个错,说明之前的安装不全
sudo apt install ros-noetic-desktop-full
再次运行roscore,成功
8小海龟
另外打开一个终端
rosrun turtlesim turtlesim_node
再另外打开一个终端
rosrun turtlesim turtle_teleop_key
上下键是前进,左右键控制方向,否则可能只是一条直线!

参考:https://blog.csdn.net/qq_44339029/article/details/108919545
b站 古月居










