避障小车的制作方法大概有两种:一个是利用超声波制作,一个是光电开关(避障模块),而跟随小车便一个是利用超声波和光电开关配合制作,一个是光电开关(避障模块)制作。
所以本篇博客,最终决定:用超声波模块制作避障、小车的避障部分;用5个光电开关制作跟随部分。
2、可以关注点赞并在下方评论,我给你邮箱发过去。
3、关注微信公众号下载:
① 关注微信公众号:Tech云
②

作者:sumjess
1、避障小车的制作
(1)伪代码部分:
主函数
{
舵机摆正
循环部分
{
c如果超声波采集的数据<X
{
电机停转
舵机左摆
b如果超声波采集的数据<X
{
舵机右摆
a如果超声波采集的数据<X
{
舵机摆正
倒车
}
aelse
{
舵机摆正
电机右转--->停下---->直行
}
baelse
{
舵机摆正
电机左转--->停下---->直行
}
}
celse
{
电机直行
}
}
}
.(2)滤波部分(超声波滤波):算术平均滤波法
/*
A、名称:算术平均滤波法
B、方法:
连续取N个采样值进行算术平均运算:
N值较大时:信号平滑度较高,但灵敏度较低;
N值较小时:信号平滑度较低,但灵敏度较高;
N值的选取:一般流量,N=12;压力:N=4。
C、优点:
适用于对一般具有随机干扰的信号进行滤波;
这种信号的特点是有一个平均值,信号在某一数值范围附近上下波动。
D、缺点:
对于测量速度较慢或要求数据计算速度较快的实时控制不适用;
比较浪费RAM。
E、整理:sumjess 2018-07-01
*/
int Filter_Value;
void setup() {
Serial.begin(9600); // 初始化串口通信
randomSeed(analogRead(0)); // 产生随机种子
}
void loop() {
Filter_Value = Filter(); // 获得滤波器输出值
Serial.println(Filter_Value); // 串口输出
delay(50);
}
// 用于随机产生一个300左右的当前值
int Get_AD() {
return random(295, 305);
}
// 算术平均滤波法
#define FILTER_N 12
int Filter() {
int i;
int filter_sum = 0;
for(i = 0; i < FILTER_N; i++) {
filter_sum += Get_AD();
delay(1);
}
return (int)(filter_sum / FILTER_N);
}
(3)舵机转向:
调节出中值和左右摆的值,写一个按键程序,每按一次旋转一定角度,便可轻易记录下各个位置的数据,操作简单,此处就不再赘述。
(4)电机接线方式如下:
https://jingyan.baidu.com/article/75ab0bcbcb5320d6864db2e4.html
(5)按照伪代码写程序:
#include <Servo.h>
#include <NewPing.h>
///目前使用的引脚: 4-5-6-9-10-12-13
//舵机设置//
Servo myservo; // 创建车体转向(X轴)舵机对象
#define servo_pin 4 // 定义车体转向舵机信号线接口
/*int servopin = 7; //定义舵机接口数字接口7
void servopulse(int angle)//定义一个脉冲函数
{
int pulsewidth=(angle*11)+500; //将角度转化为500-2480的脉宽值
digitalWrite(servopin,HIGH); //将舵机接口电平至高
delayMicroseconds(pulsewidth); //延时脉宽值的微秒数
digitalWrite(servopin,LOW); //将舵机接口电平至低
delayMicroseconds(20000-pulsewidth);
}*/
超声波设置//
//#define PING_PIN 12 // Arduino pin tied to both trigger and echo pins on the ultrasonic sensor.
#define MAX_DISTANCE 450 // 设置最大距离(厘米)。最大传感器距离为400-500cm。
#define TRIG_PIN 12 //超声波引脚配置
#define ECHO_PIN 13 //超声波引脚配置
int Filter_Value;//滤波后的数值
int Filter();//用于滤波计算
int Get_ultra();//用于获取一个目前的超声波值
#define FILTER_N 10 //超声波均值滤波(去多少次做平均数)
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE); // 调整引脚和最大距离
电机设置//
#define leftA_PIN 5
#define leftB_PIN 6
#define righA_PIN 9
#define righB_PIN 10
void motor_pinint(void); //引脚初始化
void forward( ); //前进
void back( ); //后退
void turnLeft( ); //左转
void turnRight( ); //右转
void turnbackLeft( ); //左后
void turnbackRight( ); //右后
void turnLeftOrigin( ); //原地左
void turnRightOrigin( ); //原地右
void _stop(); //停车
void setup()
{
Serial.begin(115200); //串口波特率115200(PC端使用)
myservo.attach(servo_pin, 1000, 2500); // min 默认1000,max 默认2500 1200 1800 2300
myservo.writeMicroseconds(1200); //摆正舵机
pinMode(TRIG_PIN, OUTPUT); // 要检测引脚上输入的脉冲宽度,需要先设置为输入状态
pinMode(ECHO_PIN, INPUT); // 要检测引脚上输入的脉冲宽度,需要先设置为输入状态
motor_pinint(); //电机引脚初始化
}
void loop()
{
if(Filter()<20)//危险
{
_stop();//电机停转
myservo.writeMicroseconds(2300);//向左转舵机
if(Filter()<20)//危险
{
myservo.writeMicroseconds(1200);//向右转舵机
if(Filter()<20)//危险
{
myservo.writeMicroseconds(1800);//向中间舵机
back( ); //后退
}
else
{
myservo.writeMicroseconds(1800);//向中间舵机
turnRight( ); //右转
delay(30);
_stop();//电机停转
forward( ); //前进
}
}
else
{
turnLeft( ); //左转
delay(30);
_stop();//电机停转
forward( ); //前进
}
}
else
{
forward( ); //前进
}
}
// Filter_Value = Filter(); // 获得滤波器输出值
// Serial.println(Filter_Value); // 串口输出
// delay(50);
// if((int)Filter_Value>100)
// myservo.writeMicroseconds(1200);//向右转舵机
// else if((50<(int)Filter_Value)&&((int)Filter_Value<100))
// myservo.writeMicroseconds(2300);//向左转舵机
// else if((0<(int)Filter_Value)&&((int)Filter_Value<49))
// myservo.writeMicroseconds(1800);//向中间舵机
/*
A、名称:算术平均滤波法
B、方法:
连续取N个采样值进行算术平均运算:
N值较大时:信号平滑度较高,但灵敏度较低;
N值较小时:信号平滑度较低,但灵敏度较高;
N值的选取:一般流量,N=12;压力:N=4。
C、优点:
适用于对一般具有随机干扰的信号进行滤波;
这种信号的特点是有一个平均值,信号在某一数值范围附近上下波动。
D、缺点:
对于测量速度较慢或要求数据计算速度较快的实时控制不适用;
比较浪费RAM。
E、整理:sumjess 2018-07-01
*/
// 用于获得一个超声波的当前值
int Get_ultra()
{
// 产生一个10us的高脉冲去触发TrigPin
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// 检测脉冲宽度,并计算出距离
return pulseIn(ECHO_PIN, HIGH) / 58.00;
}
int Filter()
{
int i;
int filter_sum = 0;
for(i = 0; i < FILTER_N; i++)
{
filter_sum += Get_ultra();
delay(30);//超声波采集用一般为30ms间隔
}
return (int)(filter_sum / FILTER_N);
}
//电机引脚初始化
void motor_pinint(void)
{
pinMode (leftA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (leftB_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righB_PIN, OUTPUT); //设置引脚为输出引脚
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward( )
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
back子函数——后退子函数
函数功能:控制车后退
**************************************************/
void back( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,120); //左轮后退
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,120); //右轮后退
}
/**************************************************
turnLeft子函数——左转子函数
函数功能:控制车左转
**************************************************/
void turnLeft( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,0); //左轮静止不动
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnbackLeft子函数——左后转弯子函数
函数功能:控制车左后转弯
**************************************************/
void turnbackLeft( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,0); //左轮静止不动
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,120); //右轮后退
}
/**************************************************
turnRight子函数——右后转弯转子函数
函数功能:控制车右后转弯
**************************************************/
void turnRight( )
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,0); //右轮静止不动
}
/**************************************************
turnbackRight子函数——右转子函数
函数功能:控制车右转
**************************************************/
void turnbackRight( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,120); //左轮后退
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,0); //右轮静止不动
}
/**************************************************
turnLeftOrigin子函数——原地左转子函数
函数功能:控制车原地左转
**************************************************/
void turnLeftOrigin( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,120); //左轮后退
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnRightOrigin子函数——原地右转子函数
函数功能:控制车原地右转
**************************************************/
void turnRightOrigin( )
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,120); //右轮后退
}
/**************************************************
stop子函数—停止子函数
函数功能:控制车停止
**************************************************/
void _stop()
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,0); //左轮静止不动
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,0); //右轮静止不动
}
2、跟随小车的制作
一、接线:
(1)电机接线:

四个逻辑通道从左到右(即IN1到IN4)分别接5、6、9、10
12v供电,5伏输出给arduino供电
注意:此处驱动一定要和arduino共地!!!否则无法传输数据。
输出A接左边电机,输出B做右边电机
(2)避障模块接线:

使用了三个该模块,分别在车的前左、前中、前右。如图:

引脚从左到右分别接的是11、8、2
二、书写代码:
下载下面的代码:
//电机使用:5-6-9-10
//避障模块使用:11--8--2
// 左 中 右
/************电机设置*************/
#define leftA_PIN 5
#define leftB_PIN 6
#define righA_PIN 9
#define righB_PIN 10
void motor_pinint(); //电机引脚初始化
void _stop(); //停车
void turnSRight(); //小右转
void turnSLeft(); //小左转
void turnRight(); //右转
void turnLeft(); //左转
void forward(); //前进
int error; //中间变量
int sensor[4]; //存取三个传感器数据信息的数组
//****************循迹模块设置 ***************//
#define left_track_PIN 11
#define middle_track_PIN 8
#define righ_track_PIN 2
int read_sensor_values(void); //读取初值
void track_pinint(); //避障引脚初始化
void setup()
{
motor_pinint(); //电机引脚初始化
}
void loop()
{
switch (read_sensor_values()){ //读取初值
case 0: turnLeft(); break;
case 1: turnSLeft(); break;
case 2: forward();break;
case 3: _stop(); break;
case 4: turnSRight(); break;
case 5: turnRight(); break;
default: _stop();break;
}
}
/*循迹模块引脚初始化*/
void track_pinint()
{
pinMode (left_track_PIN , INPUT); //设置引脚为输入引脚
pinMode (middle_track_PIN, INPUT); //设置引脚为输入引脚
pinMode (righ_track_PIN , INPUT); //设置引脚为输入引脚
}
/*电机引脚初始化*/
void motor_pinint(void)
{
pinMode (leftA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (leftB_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righB_PIN, OUTPUT); //设置引脚为输出引脚
}
int read_sensor_values()
{
sensor[0] = digitalRead(left_track_PIN);
sensor[1] = digitalRead(middle_track_PIN);
sensor[2] = digitalRead(righ_track_PIN);
//0为检测到障碍
if ((sensor[0] == 0) && (sensor[1] == 0) && (sensor[2] == 1)) {
error = 0;// 001 大左转
} else if ((sensor[0] == 0) && (sensor[1] == 1) && (sensor[2] == 1)) {
error = 1;// 011 小左转
} else if ((sensor[0] == 1) && (sensor[1] == 1) && (sensor[2] == 1)) {
error = 2;// 111 前进
} else if ((sensor[0] == 0) && (sensor[1] == 1) && (sensor[2] == 0)) {
error = 3;// 010 停止
} else if ((sensor[0] == 1) && (sensor[1] == 1) && (sensor[2] == 0)) {
error = 4;// 110 小右转
} else if ((sensor[0] == 1) && (sensor[1] == 0) && (sensor[2] == 0)) {
error = 5;// 100 大右转
} else if ((sensor[0] == 0) && (sensor[1] == 0) && (sensor[2] == 0)) {
error = 3;// 000 前进
} else if ((sensor[0] == 1) && (sensor[1] == 0) && (sensor[2] == 1)) {
error = 3;// 101 停止
} else error = 3;// error 停止
return error;
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward()
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnLeft子函数——大左转子函数
函数功能:控制车大左转
**************************************************/
void turnLeft()
{
analogWrite(leftA_PIN,50);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnRight子函数——小右转子函数
函数功能:控制车大右转弯
**************************************************/
void turnRight()
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,50);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnLeft子函数——大左转子函数
函数功能:控制车小左转
**************************************************/
void turnSLeft()
{
analogWrite(leftA_PIN,90);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnRight子函数——小右转子函数
函数功能:控制车小右转弯
**************************************************/
void turnSRight()
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,90);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
stop子函数—停止子函数
函数功能:控制车停止
**************************************************/
void _stop()
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,0); //左轮静止不动
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,0); //右轮静止不动
}
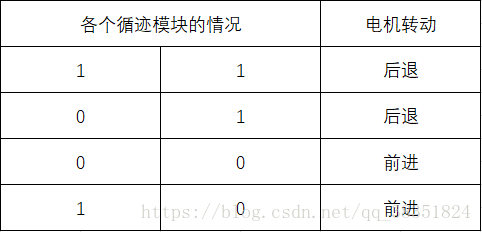
3、魔术手的制作
(1)逻辑部分:
只写了一个简单的,能前后走的,用了跟随小车的左右两边的那个两个避障模块
(2)按照逻辑部分部分程序(算法):
//电机使用:5-6-9-10
//避障模块使用:11----2
// 左 右
/************电机设置*************/
#define leftA_PIN 5
#define leftB_PIN 6
#define righA_PIN 9
#define righB_PIN 10
void motor_pinint(); //电机引脚初始化
void back(int a);
void forward(int a);
//****************循迹模块设置 ***************//
#define left_track_PIN 11
#define righ_track_PIN 2
void read_sensor_values(void); //读取初值
void track_pinint(); //避障引脚初始化
int error; //中间变量
int sensor[4]; //存取三个传感器数据信息的数组
void setup()
{
motor_pinint(); //电机引脚初始化
}
void loop()
{
read_sensor_values3();
}
/*循迹模块引脚初始化*/
void track_pinint()
{
pinMode (left_track_PIN , INPUT); //设置引脚为输入引脚
pinMode (righ_track_PIN , INPUT); //设置引脚为输入引脚
}
/*电机引脚初始化*/
void motor_pinint()
{
pinMode (leftA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (leftB_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righB_PIN, OUTPUT); //设置引脚为输出引脚
}
void read_sensor_values3()
{
sensor[0] = digitalRead(left_track_PIN);
sensor[2] = digitalRead(righ_track_PIN);
/*****左边远、右边近*****/
if ( (sensor[0] == 1) && (sensor[2] == 1) || (sensor[0] == 0) && (sensor[2] == 1)) {
forward(80); // 前进 1 1/0 1
} else if ( (sensor[0] == 0) && (sensor[2] == 0) || (sensor[0] == 1) && (sensor[2] == 0)) {
back(80); // 后退 0 0/1 0
}
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward(int a)
{
analogWrite(leftA_PIN,a);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,a);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
forward子函数——后退子函数
函数功能:控制车后退
**************************************************/
void back(int a)
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,a); //左轮后退
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,a); //右轮后退
}










