调用过程中涉及到的文件
Driver: ft5x0x.cà
HAL: SensorGTP.cpp à sensors.cpp à SensorDevice.cpp à
Framework: SensorService.cppàSensorManager.cppà android_hardware_SensorManager.cpp à
SensorManager.java à PowerManagerService.java
本文分几个部分:
1、驱动层:tp驱动中实现感应开关
2、HAL层:打开/dev/proximity字符设备,并实现感应开关操作,相当于linux应用程序开发层。
3、framework层:涉及到SensorManager.java与PowerManagerService.java两个文件,主要是负责背光亮灭与sensor开启关闭。
4、app层:主要是PhoneApp接通电话开关感应。
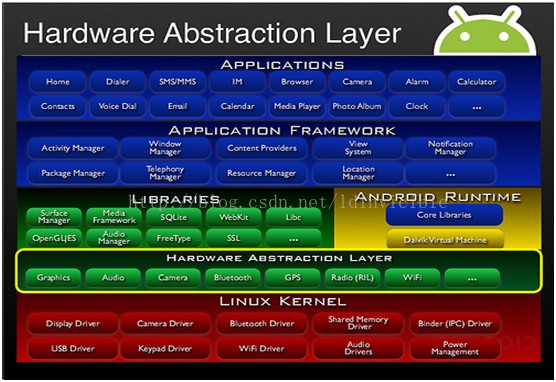
关于android分层架构都应该知道:如下图
第一部分:TP驱动实现距离感应开关实现代码
1、 首先在probe函数中增加一段程序,组要是注册一个混杂字符设备
#include <linux/miscdevice.h>
#include <linux/wakelock.h>
//#include <linux/eventstore.h>
#include <linux/fs.h>
//#include <linux/miscdevice.h>
#include <linux/ioctl.h>
#define GTP_PROXIMITY 1 //宏开关
static int gtp_proximity_start = 0; /* 0 is stop, 1 is start */
#define GTP_IOCTL_MAGIC 0x5D
#define GTP_IOCTL_PROX_ON _IO(GTP_IOCTL_MAGIC, 7)
#define GTP_IOCTL_PROX_OFF _IO(GTP_IOCTL_MAGIC, 8)
#define FT5X0X_SENSOR_NAME "gtp_proximity" //新增字符设备名称
#if GTP_PROXIMITY
err = misc_register(>p_proximity_misc);
if (err < 0)
{
pr_err("%s: could not register misc device\n", __func__);
}
#endif
static struct miscdevice gtp_proximity_misc = {
.minor = MISC_DYNAMIC_MINOR,
.name = FT5X0X_SENSOR_NAME,
.fops = >p_proximity_fops,
};
static const struct file_operations gtp_proximity_fops = {
.owner = THIS_MODULE,
.open = FT5X0X_proximity_open,
.release = NULL,//_proximity_release,
.ioctl = FT5X0X_proximity_ioctl,
/*.ioctl = FT5X0x_proximity_ioctl,unlocked_ioctl*/
};
static int ft5x0x_proximity_open(struct inode *inode, struct file *file)
{
int err;
err = nonseekable_open(inode, file);
if (err < 0)
return err;
file->private_data = i2c_get_clientdata(this_client);
printk("ft5x0x_proximity_open-file->private_data=%x\r\n",file->private_data);
return 0;
}
HAL层会根据幻数调用ft5x0x_proximity_ioctl中是否打开距离感应。
static int ft5x0x_proximity_ioctl(struct inode *inode, struct file *file,unsigned int cmd, unsigned long arg)
{
//printk("ft5x0x_proximity_ioctl");
switch (cmd) {
case GTP_IOCTL_PROX_ON:
//gtp_proximity_open();
ft5x0x_proximity_set_enable(1);
gtp_proximity_start = 1; /* 0 is stop, 1 is start */
printk("ft5x0x_proximity_ioctl--on\r\n");
break;
case GTP_IOCTL_PROX_OFF:
//gtp_proximity_release();
ft5x0x_proximity_set_enable(0);
gtp_proximity_start = 0;
printk("ft5x0x_proximity_ioctl--off\r\n");
break;
default:
//pr_err("%s: invalid cmd %d\n", __func__, _IOC_NR(cmd));
printk("ft5x0x_proximity_ioctl--error\r\n");
return -EINVAL;
}
return 0;
}
关于如何判断是否接近,可以向FAE咨询,让他们提供说明文档,改哪些寄存器的值实现。
ft5x0x 类型的TP实现:Enable 脸部接近感应功能,拨出电话并且已经开始连线时或者是来电接通电话时启
动此项功能,手机启动触摸IC进入大面积感应发出的I2C指令如下:Write(0xB0,0x01)
操作说明:主控向TP的0xB0 单元写0x01 数据,写入成功后TP即进入脸部接近感应功能;
static void ft5x0x_proximity_set_enable(int enable)
{
if(enable == 1)
{
gtp_proximity_start = 1;
}else{
gtp_proximity_start = 0;
}
ft5x0x_write_reg(0xB0, enable);
}
在probe函数中
INIT_WORK(&ft5x0x_ts->pen_event_work, ft5x0x_ts_pen_irq_work);
static void ft5x0x_ts_pen_irq_work(struct work_struct *work)
{
#if 1
int ret = -1;
// printk("==work 1=\n");
#ifdef GTP_PROXIMITY
printk("_ts_pen_irq_work---\r\n");
ft5x0x_ts_proximity_work();
#endif
ret = ft5x0x_read_data();
if (ret == 0) {
ft5x0x_report_value();
}
// else printk("data package read error\n");
// printk("==work 2=\n");
// msleep(1);
#endif
enable_irq(this_client->irq);
}
2,TP当在手机“Enable脸部接近接触感应”模式时:
2.1 听筒端靠近人体距离小于8mm时(具体距离以实测为准),主机端会收到如下数据包:
I2C start +I2C地址+0x00+0xc0+其它相关数据+ I2Cstop(0xc0 是以手势码的形式发出的)
2.2 听筒端移开人体超过8mm时(具体距离以实测为准),主机端会收到如下数据包:
I2C start + I2C地址+0x00+0xe0+其它相关数据+ I2Cstop(0xe0 是以手势码的形式发出的)
3,Disable脸部接近感应(预设) 结束通话时退出大面积感应功能。手机发出的I2C数据:
Write(0xb0,0x00)
操作说明:主机向从机0xb0 地址写0x00数据,写入成功后退出大面积感应功能。
mso- Wat����ily:宋体;mso-fareast-theme-font:minor-fareast;mso-hansi-font-family:Calibri;mso-hansi-theme-font:minor-latin'>开启关闭。
4、app层:主要是PhoneApp接通电话开关感应。
static void ft5x0x_ts_proximity_work(void)
{
static int value_temp = 0;
int value;
char buffer[30]={0};
struct ft5x0x_ts_data *data = i2c_get_clientdata(this_client);
i2c_smbus_read_i2c_block_data(this_client, 0x00, 8, &(buffer[0]));
printk("-ft5x0x_ts_proximity_work-buffer[1] =-%x\n", buffer[1]);
if(gtp_proximity_start == 1)
{
if (buffer[1]==0xC0)
{
input_report_abs(data->input_dev, ABS_DISTANCE, 0); //report far
//input_sync(data->input_dev);
//value_temp = value;
printk("-ft5x0x_ts_proximity_work--near\r\n");
}
else if(buffer[1]==0xE0)
{
input_report_abs(data->input_dev, ABS_DISTANCE, 1); //report far
printk("-ft5x0x_ts_proximity_work--far\r\n");
}
}}
在suspend与resume不走tp正常流程。
static void ft5x0x_ts_suspend(struct early_suspend *handler)
{
#if GTP_PROXIMITY
if (gtp_proximity_start == 1)
return;
#endif
… …
}
static void ft5x0x_ts_resume(struct early_suspend *handler)
{
printk("==%s==\n", __FUNCTION__);
#if GTP_PROXIMITY
if (gtp_proximity_start == 1)
return;
#endif
… …
}
TP驱动层距离感应已经实现,下一步就是HAL层调用驱动了。

第二部:HAL层实现调用驱动程序,向上层提供接口。
SensorGTP.cpp
#include <fcntl.h>
#include <errno.h>
#include <math.h>
#include <poll.h>
#include <unistd.h>
#include <dirent.h>
#include <sys/select.h>
#include <cutils/log.h>
#include "SensorGTP.h"
#include "sensors.h"
#define ft5x0x_DEVICE_NAME "/dev/gtp_proximity" //设备节点
#define GTP_IOCTL_MAGIC 0x5D
#define GTP_IOCTL_GET_PFLAG _IOR(GTP_IOCTL_MAGIC, 1, int)
#define GTP_IOCTL_GET_LFLAG _IOR(GTP_IOCTL_MAGIC, 2, int)
#define GTP_IOCTL_SET_PFLAG _IOW(GTP_IOCTL_MAGIC, 3, int)
#define GTP_IOCTL_SET_LFLAG _IOW(GTP_IOCTL_MAGIC, 4, int)
#define GTP_IOCTL_GET_DATA _IOW(GTP_IOCTL_MAGIC, 5, unsigned char)
#define GTP_IOCTL_PROX_ON _IO(GTP_IOCTL_MAGIC, 7)
#define GTP_IOCTL_PROX_OFF _IO(GTP_IOCTL_MAGIC, 8)
/*****************************************************************************/
SensorGTP::SensorGTP()
: SensorBase(ft5x0x_DEVICE_NAME, "ft5x0x_ts"),
mEnabled(0),
mPendingMask(0),
mInputReader(32),
mHasPendingEvent(false)
{
memset(mPendingEvents, 0, sizeof(mPendingEvents));
mPendingEvents[Proximity].version = sizeof(sensors_event_t);
mPendingEvents[Proximity].sensor = ID_P;
mPendingEvents[Proximity].type = SENSOR_TYPE_PROXIMITY;
for (int i=0 ; i<numSensors ; i++)
mDelays[i] = 200000000; // 200 ms by default
}
SensorGTP::~SensorGTP()
{
}
bool SensorGTP::hasPendingEvents() const
{
return mHasPendingEvent;
}
int SensorGTP::setDelay(int32_t handle, int64_t ns)
{
return 0;
}
int SensorGTP::setEnable(int32_t handle, int en)
{
int what = -1;
int cmd;
int err = 0;
int newState = en ? 1 : 0;
switch (handle) {
case ID_P: what = Proximity; break;
}
if (uint32_t(what) >= numSensors)
return -EINVAL;
if (!mEnabled)
open_device();
switch (what)
{
case Proximity: //将调用驱动层的ioctol实现开关距离感应
if (newState)
{
cmd = GTP_IOCTL_PROX_ON;
}
else
{
cmd = GTP_IOCTL_PROX_OFF;
}
break;
}
int flags = newState;
err = ioctl(dev_fd, cmd, &flags);
LOGD("ioctl,err=%d\n",err);
err = err < 0 ? -errno : 0;
LOGD("SensorGTP::enable what=%d; flags=%d; err=%d\n", what, flags, err);
LOGE_IF(err, "ECS_IOCTL_APP_SET_XXX failed (%s)", strerror(-err));
if (!err)
{
mEnabled &= ~(1 << what);
mEnabled |= (uint32_t(flags) << what);
}
LOGD("SensorGTP::mEnabled=0x%x\n", mEnabled);
if (!mEnabled)
close_device();
return err;
}
int SensorGTP::getEnable(int32_t handle)
{
int enable=0;
int what = -1;
switch (handle) {
case ID_P: what = Proximity; break;
}
if (uint32_t(what) >= numSensors)
return -EINVAL;
enable = mEnabled & (1 << what);
if(enable > 0)
enable = 1;
LOGD("SensorGTP::mEnabled=0x%x; enable=%d\n", mEnabled, enable);
return enable;
}
int SensorGTP::readEvents(sensors_event_t* data, int count)
{
if (count < 1)
return -EINVAL;
ssize_t n = mInputReader.fill(data_fd);
if (n < 0)
return n;
int numEventReceived = 0;
input_event const* event;
while (count && mInputReader.readEvent(&event)) {
int type = event->type;
if (type == EV_ABS) {
processEvent(event->code, event->value);
mInputReader.next();
} else if (type == EV_SYN) {
int64_t time = timevalToNano(event->time);
for (int j=0 ; count && mPendingMask && j<numSensors ; j++) {
if (mPendingMask & (1<<j)) {
mPendingMask &= ~(1<<j);
mPendingEvents[j].timestamp = time;
if (mEnabled & (1<<j)) {
*data++ = mPendingEvents[j];
count--;
numEventReceived++;
}
}
}
if (!mPendingMask) {
mInputReader.next();
}
} else {
LOGE("Apds9900Sensor: unknown event (type=%d, code=%d)",
type, event->code);
mInputReader.next();
}
}
return numEventReceived;
}
void SensorGTP::processEvent(int code, int value)
{
switch (code) {
case EVENT_TYPE_PROXIMITY:
mPendingMask |= 1<<Proximity;
mPendingEvents[Proximity].distance = value;
LOGD("SensorGTP: mPendingEvents[Proximity].distance = %f",mPendingEvents[Proximity].distance);
break;
default:
LOGD("SensorGTP: default value = %d",value);
break;
}
}
SensorGTP.h
#ifndef ANDROID_GTP_SENSOR_H
#define ANDROID_GTP_SENSOR_H
#include <stdint.h>
#include <errno.h>
#include <sys/cdefs.h>
#include <sys/types.h>
#include "sensors.h"
#include "SensorBase.h"
#include "InputEventReader.h"
/*****************************************************************************/
struct input_event;
class SensorGTP : public SensorBase
{
public:
SensorGTP();
virtual ~SensorGTP();
enum
{
Light = 0,
Proximity = 1,
numSensors
};
virtual int setDelay(int32_t handle, int64_t ns);
virtual int setEnable(int32_t handle, int enabled);
virtual bool hasPendingEvents() const;
virtual int readEvents(sensors_event_t* data, int count);
virtual int getEnable(int32_t handle);
void processEvent(int code, int value);
private:
int update_delay();
uint32_t mEnabled;
bool mHasPendingEvent;
uint32_t mPendingMask;
InputEventCircularReader mInputReader;
sensors_event_t mPendingEvents[numSensors];
uint64_t mDelays[numSensors];
};
/*****************************************************************************/
#endif // ANDROID_GT8XX_SENSOR_H
此函数初始化将在sensors.cpp函数中实现,关于此阶段的说明,先来看下SensorDevice.cpp文件中的函数,此文件中实现了SensorDevice的初始化并且通过
hw_get_module(SENSORS_HARDWARE_MODULE_ID,(hw_module_tconst**)&mSensorModule);获取sensor模块,将sensor打开。
SensorDevice::SensorDevice()
: mSensorDevice(0),
mSensorModule(0)
{
status_t err = hw_get_module(SENSORS_HARDWARE_MODULE_ID,
(hw_module_t const**)&mSensorModule);
LOGE_IF(err, "couldn't load %s module (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorModule) {
err = sensors_open(&mSensorModule->common, &mSensorDevice);
//1、此函数将会调用sensors.cpp文件中的open_sensors函数。
LOGE_IF(err, "couldn't open device for module %s (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorDevice) {
sensor_t const* list;
//2、此函数将调用sensors.cpp中的sensors__get_sensors_list函数。
ssize_t count = mSensorModule->get_sensors_list(mSensorModule, &list);
mActivationCount.setCapacity(count);
Info model;
for (size_t i=0 ; i<size_t(count) ; i++) {
mActivationCount.add(list[i].handle, model);
mSensorDevice->activate(mSensorDevice, list[i].handle, 0);//3、
}
}
}
}
在上面一个函数标志1中函数将会调用:
struct sensors_module_t HAL_MODULE_INFO_SYM = {
common: {
tag: HARDWARE_MODULE_TAG,
version_major: 1,
version_minor: 0,
id: SENSORS_HARDWARE_MODULE_ID,
name: "AKM Sensor module",
author: "Asahi Kasei Microdevices",
methods: &sensors_module_methods,
},
get_sensors_list: sensors__get_sensors_list,
};
static struct hw_module_methods_t sensors_module_methods = {
open: open_sensors
};
static int open_sensors(const struct hw_module_t* module, const char* id,
struct hw_device_t** device)
{
int status = -EINVAL;
//new 一个sensors_poll_context_t并初始化
sensors_poll_context_t *dev = new sensors_poll_context_t();
memset(&dev->device, 0, sizeof(sensors_poll_device_t));
dev->device.common.tag = HARDWARE_DEVICE_TAG;
dev->device.common.version = 0;
dev->device.common.module = const_cast<hw_module_t*>(module);
dev->device.common.close = poll__close;
dev->device.activate = poll__activate;
dev->device.setDelay = poll__setDelay;
dev->device.poll = poll__poll;
*device = &dev->device.common;
status = 0;
return status;
}
在sensors_poll_context_t *dev = new sensors_poll_context_t();函数中
sensors_poll_context_t::sensors_poll_context_t()
{
//new 并初始化SensorGTP()
mSensors[gtp_proximity] = new SensorGTP();
mPollFds[gtp_proximity].fd = mSensors[gtp_proximity]->getFd();
mPollFds[gtp_proximity].events = POLLIN;
mPollFds[gtp_proximity].revents = 0;
int wakeFds[2];
int result = pipe(wakeFds);
LOGE_IF(result<0, "error creating wake pipe (%s)", strerror(errno));
fcntl(wakeFds[0], F_SETFL, O_NONBLOCK);
fcntl(wakeFds[1], F_SETFL, O_NONBLOCK);
mWritePipeFd = wakeFds[1];
mPollFds[wake].fd = wakeFds[0];
mPollFds[wake].events = POLLIN;
mPollFds[wake].revents = 0;
}
3、在上一个函数中mSensorDevice->activate(mSensorDevice, list[i].handle, 0);
此函数调用了:
int sensors_poll_context_t::activate(int handle, int enabled) {
/*将根据handle返回哪个sensor。Handle有ID_A:acc;ID_M:ID_O:mag;ID_L:ID_P:
gtp_proximity; al3006_pls;*/
int drv = handleToDriver(handle);
int err;
err = mSensors[drv]->setEnable(handle, enabled);
if (enabled && !err) {
const char wakeMessage(WAKE_MESSAGE);
int result = write(mWritePipeFd, &wakeMessage, 1);
LOGE_IF(result<0, "error sending wake message (%s)", strerror(errno));
}
return err;
}
err = mSensors[drv]->setEnable(handle, enabled);
将调用int SensorGTP::setEnable(int32_t handle, int en)使能距离感应。
现在分析第二部分中的第2步:
SensorService.cppSensorManager.cpp android_hardware_SensorManager.cpp
—> SensorManager.java
在SensorService.cpp中初始化SensorDevice是在如下函数中:
void SensorService::onFirstRef()
{
LOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance());
在SensorManager.cpp中
SensorManager::SensorManager()
: mSensorList(0)
{
//获取sensorservice服务
const String16 name("sensorservice");
while (getService(name, &mSensorServer) != NO_ERROR) {
usleep(250000);
}
//获取sensor项
mSensors = mSensorServer->getSensorList();
size_t count = mSensors.size();
mSensorList = (Sensor const**)malloc(count * sizeof(Sensor*));
for (size_t i=0 ; i<count ; i++) {
mSensorList[i] = mSensors.array() + i;
}
}
JNI层android_hardware_SensorManager.cpp
framework层SensorManager.java
在PowerManagerService.java中
public void acquireWakeLockLocked(int flags, IBinder lock, int uid, int pid, String tag,WorkSource ws) {
… …
if (isScreenLock(flags)) {
// if this causes a wakeup, we reactivate all of the locks and
// set it to whatever they want. otherwise, we modulate that
// by the current state so we never turn it more on than
// it already is.
if ((flags & LOCK_MASK) == PowerManager.PROXIMITY_SCREEN_OFF_WAKE_LOCK) {
mProximityWakeLockCount++;
if (mProximityWakeLockCount == 1) {
enableProximityLockLocked();//打开距离感应函数
}
} else {
if ((wl.flags & PowerManager.ACQUIRE_CAUSES_WAKEUP) != 0) {
int oldWakeLockState = mWakeLockState;
mWakeLockState = mLocks.reactivateScreenLocksLocked();
// Disable proximity sensor if if user presses power key while we are in the
// "waiting for proximity sensor to go negative" state.
if ((mWakeLockState & SCREEN_ON_BIT) != 0
&& mProximitySensorActive && mProximityWakeLockCount == 0) {
mProximitySensorActive = false;
}
if (mSpew) {
Slog.d(TAG, "wakeup here mUserState=0x" + Integer.toHexString(mUserState)
+ " mWakeLockState=0x"
+ Integer.toHexString(mWakeLockState)
+ " previous wakeLockState=0x"
+ Integer.toHexString(oldWakeLockState));
}
} else {
if (mSpew) {
Slog.d(TAG, "here mUserState=0x" + Integer.toHexString(mUserState)
+ " mLocks.gatherState()=0x"
+ Integer.toHexString(mLocks.gatherState())
+ " mWakeLockState=0x" + Integer.toHexString(mWakeLockState));
}
mWakeLockState = (mUserState | mWakeLockState) & mLocks.gatherState();
}
setPowerState(mWakeLockState | mUserState);
}
}
else if ((flags & LOCK_MASK) == PowerManager.PARTIAL_WAKE_LOCK) {
if (newlock) {
mPartialCount++;
if (mPartialCount == 1) {
if (LOG_PARTIAL_WL) EventLog.writeEvent(EventLogTags.POWER_PARTIAL_WAKE_STATE, 1, tag);
}
}
Power.acquireWakeLock(Power.PARTIAL_WAKE_LOCK,PARTIAL_NAME);
}
在函数中
private void enableProximityLockLocked() {
if (mDebugProximitySensor) {
Slog.d(TAG, "enableProximityLockLocked");
}
if (!mProximitySensorEnabled) {
// clear calling identity so sensor manager battery stats are accurate
long identity = Binder.clearCallingIdentity();
try {
//注册监听器mProximityListener
mSensorManager.registerListener(mProximityListener, mProximitySensor,
SensorManager.SENSOR_DELAY_NORMAL);
mProximitySensorEnabled = true;
} finally {
Binder.restoreCallingIdentity(identity);
}
}
}
在函数中
SensorEventListener mProximityListener = new SensorEventListener() {
public void onSensorChanged(SensorEvent event) {
long milliseconds = SystemClock.elapsedRealtime();
synchronized (mLocks) {
float distance = event.values[0];
long timeSinceLastEvent = milliseconds - mLastProximityEventTime;
mLastProximityEventTime = milliseconds;
mHandler.removeCallbacks(mProximityTask);
boolean proximityTaskQueued = false;
// compare against getMaximumRange to support sensors that only return 0 or 1
//比较接近距离,是否开启感应(0< distance < 5 cm&&)
boolean active = (distance >= 0.0 && distance < PROXIMITY_THRESHOLD &&
distance < mProximitySensor.getMaximumRange());
if (mDebugProximitySensor) {
Slog.d(TAG, "mProximityListener.onSensorChanged active: " + active);
}
if (timeSinceLastEvent < PROXIMITY_SENSOR_DELAY) {
// enforce delaying atleast PROXIMITY_SENSOR_DELAY before processing
mProximityPendingValue = (active ? 1 : 0);
mHandler.postDelayed(mProximityTask, PROXIMITY_SENSOR_DELAY - timeSinceLastEvent);
proximityTaskQueued = true;
} else {
// process the value immediately
mProximityPendingValue = -1;
proximityChangedLocked(active);//改变距离感应状态
}
// update mProximityPartialLock state
boolean held = mProximityPartialLock.isHeld();
if (!held && proximityTaskQueued) {
// hold wakelock until mProximityTask runs
mProximityPartialLock.acquire();
} else if (held && !proximityTaskQueued) {
mProximityPartialLock.release();
}
}
}
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// ignore
}
};
将会进入
private void proximityChangedLocked(boolean active) {
if (mDebugProximitySensor) {
Slog.d(TAG, "proximityChangedLocked, active: " + active);
}
if (!mProximitySensorEnabled) {
Slog.d(TAG, "Ignoring proximity change after sensor is disabled");
return;
}
if (active) {
if (mDebugProximitySensor) {
Slog.d(TAG, "b mProxIgnoredBecauseScreenTurnedOff="
+ mProxIgnoredBecauseScreenTurnedOff);
}
if (!mProxIgnoredBecauseScreenTurnedOff) {
//会进入此函数
goToSleepLocked(SystemClock.uptimeMillis(),
WindowManagerPolicy.OFF_BECAUSE_OF_PROX_SENSOR);
}
mProximitySensorActive = true;
} else {
// proximity sensor negative events trigger as user activity.
// temporarily set mUserActivityAllowed to true so this will work
// even when the keyguard is on.
mProximitySensorActive = false;
if (mDebugProximitySensor) {
Slog.d(TAG, "b mProxIgnoredBecauseScreenTurnedOff="
+ mProxIgnoredBecauseScreenTurnedOff);
}
if (!mProxIgnoredBecauseScreenTurnedOff) {
forceUserActivityLocked();
}
if (mProximityWakeLockCount == 0) {
// disable sensor if we have no listeners left after proximity negative
disableProximityLockLocked();
}
}
}
private void goToSleepLocked(long time, int reason) {
if (mLastEventTime <= time) {
mLastEventTime = time;
// cancel all of the wake locks
mWakeLockState = SCREEN_OFF;
int N = mLocks.size();
int numCleared = 0;
boolean proxLock = false;
for (int i=0; i<N; i++) {
WakeLock wl = mLocks.get(i);
if (isScreenLock(wl.flags)) {
if (((wl.flags & LOCK_MASK) == PowerManager.PROXIMITY_SCREEN_OFF_WAKE_LOCK)
&& reason == WindowManagerPolicy.OFF_BECAUSE_OF_PROX_SENSOR) {
proxLock = true;
} else {
mLocks.get(i).activated = false;
numCleared++;
}
}
}
if (!proxLock) {
mProxIgnoredBecauseScreenTurnedOff = true;
if (mDebugProximitySensor) {
Slog.d(TAG, "setting mProxIgnoredBecauseScreenTurnedOff");
}
}
EventLog.writeEvent(EventLogTags.POWER_SLEEP_REQUESTED, numCleared);
mStillNeedSleepNotification = true;
mUserState = SCREEN_OFF;
//设置供电状态
setPowerState(SCREEN_OFF, false, reason);
cancelTimerLocked();
}
}
上述阶段是指LCD背光开灭状态控制。
下面来分析最后一个阶段PhoneApp如何调用。
在OnCreate()中
// Wake lock used to control proximity sensor behavior.
if ((pm.getSupportedWakeLockFlags()
& PowerManager.PROXIMITY_SCREEN_OFF_WAKE_LOCK) != 0x0) {
mProximityWakeLock =
pm.newWakeLock(PowerManager.PROXIMITY_SCREEN_OFF_WAKE_LOCK, LOG_TAG);
}
if (DBG) Log.d(LOG_TAG, "onCreate: mProximityWakeLock: " + mProximityWakeLock);
// create mAccelerometerListener only if we are using the proximity sensor
if (proximitySensorModeEnabled()) {
mAccelerometerListener = new AccelerometerListener(this, this);
}
/* package */ void setBeginningCall(boolean beginning) {
// Note that we are beginning a new call, for proximity sensor support
mBeginningCall = beginning;
// Update the Proximity sensor based on mBeginningCall state
//更新距离感应状态
updateProximitySensorMode(mCM.getState());
}
/* package */ void updateProximitySensorMode(Phone.State state) {
if (VDBG) Log.d(LOG_TAG, "updateProximitySensorMode: state = " + state);
if (proximitySensorModeEnabled()) {
synchronized (mProximityWakeLock) {
// turn proximity sensor off and turn screen on immediately if
// we are using a headset, the keyboard is open, or the device
// is being held in a horizontal position.
boolean screenOnImmediately = (isHeadsetPlugged()
|| PhoneUtils.isSpeakerOn(this)
|| ((mBtHandsfree != null) && mBtHandsfree.isAudioOn())
|| mIsHardKeyboardOpen);
// We do not keep the screen off when we are horizontal, but we do not force it
// on when we become horizontal until the proximity sensor goes negative.
// boolean horizontal = (mOrientation == AccelerometerListener.ORIENTATION_HORIZONTAL);
// && !horizontal
if ((((!PhoneUtils.isVideoCall()) && (state == Phone.State.OFFHOOK)) || mBeginningCall) && !screenOnImmediately ) {
// Phone is in use! Arrange for the screen to turn off
// automatically when the sensor detects a close object.
if (!mProximityWakeLock.isHeld()) {
if (DBG) Log.d(LOG_TAG, "updateProximitySensorMode: acquiring...");
//注意此函数
mProximityWakeLock.acquire();
} else {
if (VDBG) Log.d(LOG_TAG, "updateProximitySensorMode: lock already held.");
}
} else {
// Phone is either idle, or ringing. We don't want any
// special proximity sensor behavior in either case.
if (mProximityWakeLock.isHeld()) {
if (DBG) Log.d(LOG_TAG, "updateProximitySensorMode: releasing...");
// Wait until user has moved the phone away from his head if we are
// releasing due to the phone call ending.
// Qtherwise, turn screen on immediately
int flags =
(screenOnImmediately ? 0 : PowerManager.WAIT_FOR_PROXIMITY_NEGATIVE);
mProximityWakeLock.release(flags);
} else {
if (VDBG) {
Log.d(LOG_TAG, "updateProximitySensorMode: lock already released.");
}
}
}
}
}
}
mProximityWakeLock.acquire();将调用PowerManagerService.java中的 public void acquire() {
if (!mRefCounted || mCount++ == 0) {
long ident = Binder.clearCallingIdentity();
try {
PowerManagerService.this.acquireWakeLockLocked(mFlags, mToken,
MY_UID, MY_PID, mTag, null);
mHeld = true;
} finally {
Binder.restoreCallingIdentity(ident);
}
}
}
然后调用
public void acquireWakeLockLocked(int flags, IBinder lock, int uid, int pid, String tag,
WorkSource ws) {
… …
if (isScreenLock(flags)) {
// if this causes a wakeup, we reactivate all of the locks and
// set it to whatever they want. otherwise, we modulate that
// by the current state so we never turn it more on than
// it already is.
if ((flags & LOCK_MASK) == PowerManager.PROXIMITY_SCREEN_OFF_WAKE_LOCK) {
mProximityWakeLockCount++;
if (mProximityWakeLockCount == 1) {
enableProximityLockLocked();
}
} else {
if ((wl.flags & PowerManager.ACQUIRE_CAUSES_WAKEUP) != 0) {
int oldWakeLockState = mWakeLockState;
mWakeLockState = mLocks.reactivateScreenLocksLocked();
if (mSpew) {
Slog.d(TAG, "wakeup here mUserState=0x" + Integer.toHexString(mUserState)
+ " mWakeLockState=0x"
+ Integer.toHexString(mWakeLockState)
+ " previous wakeLockState=0x"
+ Integer.toHexString(oldWakeLockState));
}
} else {
if (mSpew) {
Slog.d(TAG, "here mUserState=0x" + Integer.toHexString(mUserState)
+ " mLocks.gatherState()=0x"
+ Integer.toHexString(mLocks.gatherState())
+ " mWakeLockState=0x" + Integer.toHexString(mWakeLockState));
}
mWakeLockState = (mUserState | mWakeLockState) & mLocks.gatherState();
}
setPowerState(mWakeLockState | mUserState);
}
}
else if ((flags & LOCK_MASK) == PowerManager.PARTIAL_WAKE_LOCK) {
if (newlock) {
mPartialCount++;
if (mPartialCount == 1) {
if (LOG_PARTIAL_WL) EventLog.writeEvent(EventLogTags.POWER_PARTIAL_WAKE_STATE, 1, tag);
}
}
Power.acquireWakeLock(Power.PARTIAL_WAKE_LOCK,PARTIAL_NAME);
}
… …
}
既上面所说的。至此tp从底层驱动到上层app整个流程分析完毕。










