上一篇文章主要讲述了目标检测的任务、目标检测的分类、目标检测的意义。近年来,因深度学习算法的蓬勃发展,图像领域的目标检测算法取得了重要进展。今天主要讲述下目标检测算法的分类。
目标检测的分类
目标检测的分类可以分为两类:一是,检测目标有无的检测任务 ;二是,精确回归目标检测框的回归任务。图像中主流的目标检测算法分为两类:
(1 ) 两步法:先产生候选区域,再对这些候选框进行分类,以及检测框的回归,这类算法总体来说计算量大但精准度高,代表算法有滑动窗口检测、 R-CNN、 Fast R-CNN、Faster R-CNN;

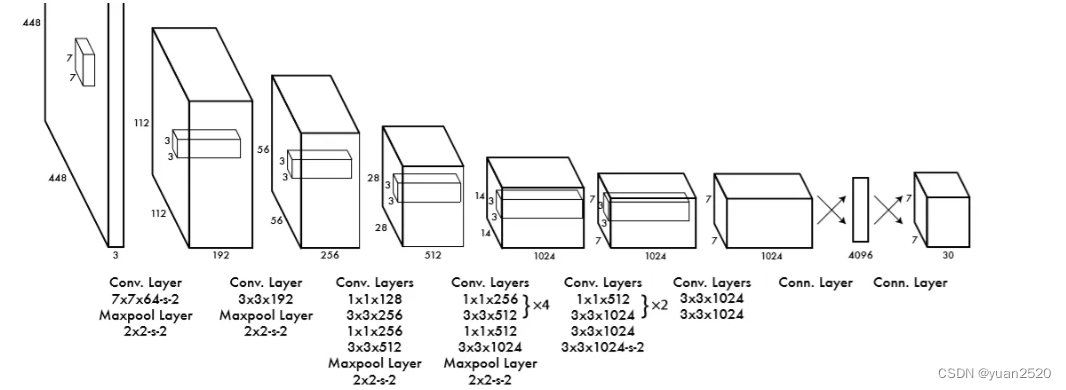
(2) —步法:均匀在图像中进行密集采样,后直接进行分类和回归,此类方法效率更高,代表算法有 YOLO 和 SSD。举例说明,以下是YOLO算法的一个简单例子,如下图所示