基于全卷积神经网络实现3D物体识别
- 一、从2D图像识别到3D物体识别
- 二、ModelNet10:3D CAD数据集
- 1.存储格式
- 2.读取方法
- 3.点云可视化
- 可视化工具
- plt可视化
- 4.数据集定义
- 三、模型组网与训练
- 1.全卷积神经网络
- 2.查看网络结构
- 3.模型训练
- 四、测试效果评估
- 1.批量测试
- 2.逐个测试
- 五、总结与升华
- 作者简介
在当今的计算机视觉系统中,2D图像识别技术已经相对成熟,但3D物体识别依然是一个关键但未被充分利用的领域。本文将围绕3D点云的物体识别展开叙述。
一、从2D图像识别到3D物体识别
二维图像是由一个个像素点组成的,这些像素点可以用数字来进行表示,例如MINIST数据集里的一张图像,可以用一个28×28的二维矩阵来表示:
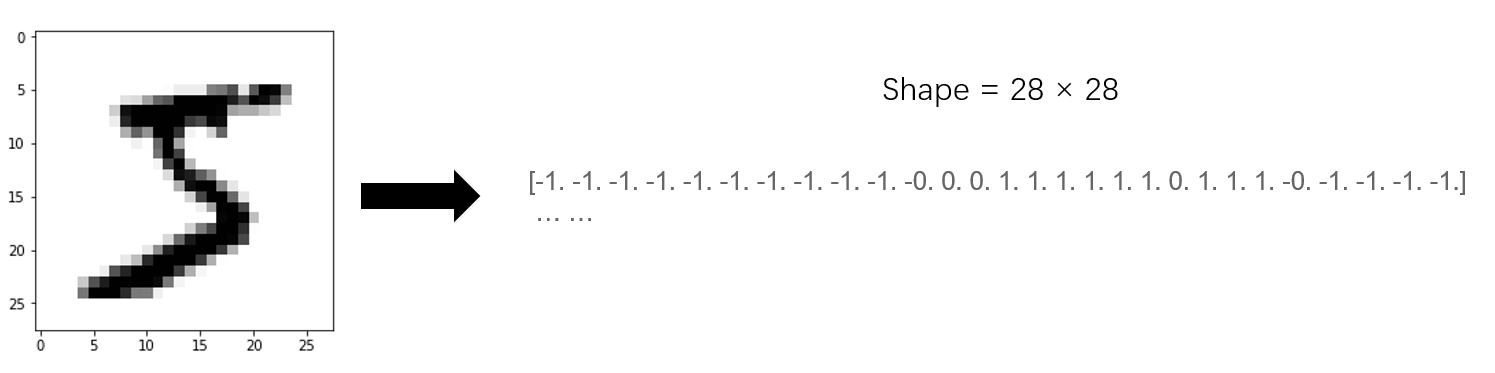
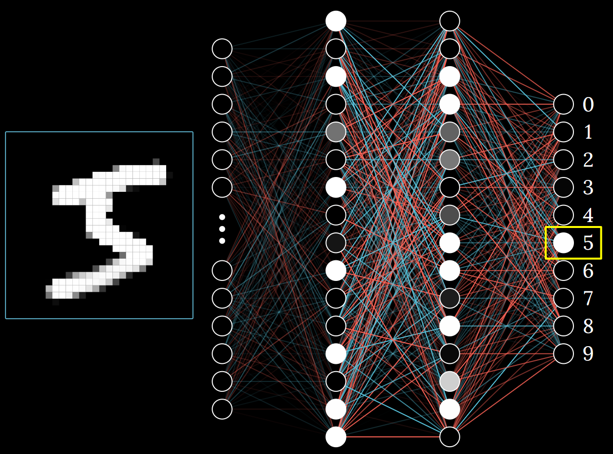
将图像作为一个二维矩阵输入到神经网络中,可以得到一个输出结果,这个结果便是对该图像的识别结果:
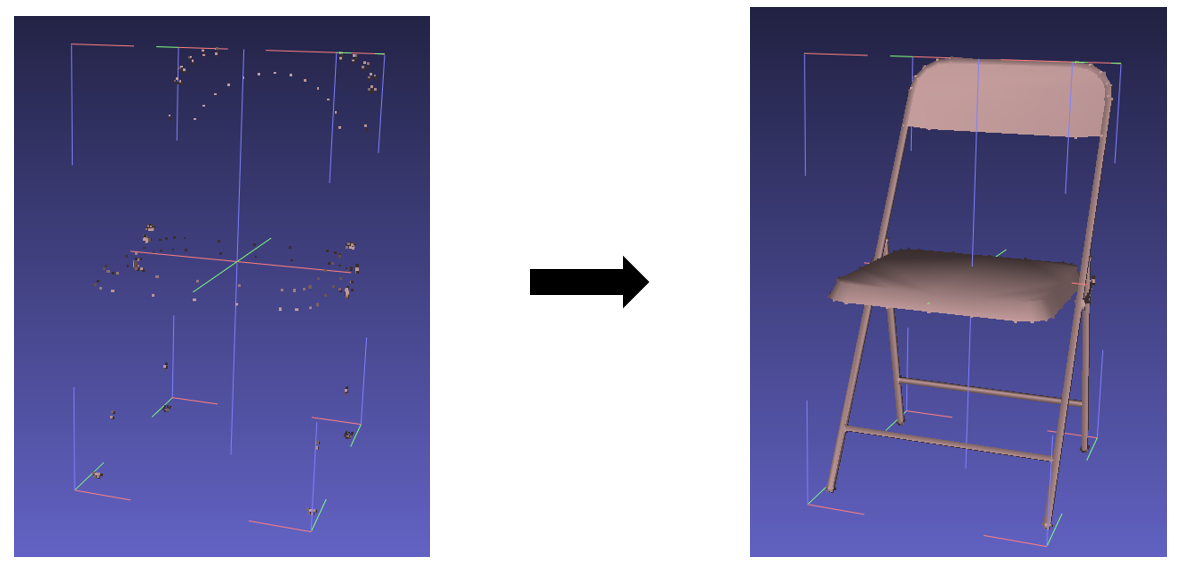
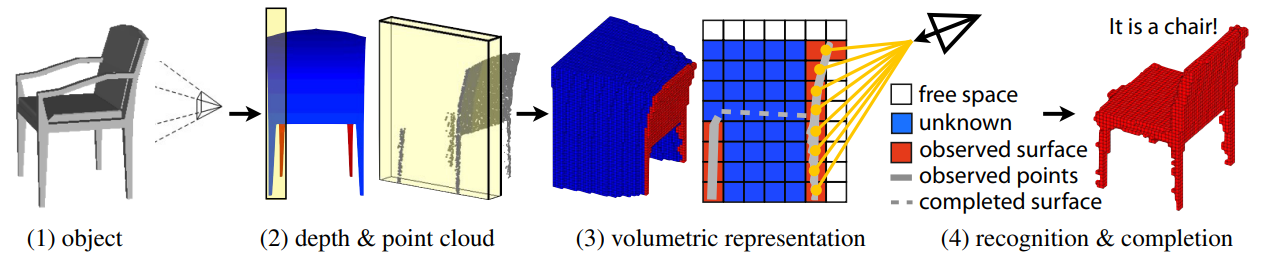
对于一个3D点云物体来说,其每个点都包含了x、y和z轴的坐标信息,对应的坐标信息其实也可以表示成二维矩阵:

既然都是二维矩阵,那么3D物体的识别便可以借鉴2D图像识别的思想来实现。
二、ModelNet10:3D CAD数据集
该数据集包含浴缸、床、椅子、桌子等10类CAD家具模型。
1.存储格式
图像文件的后缀一般是.jpg或.png;对于三维物体文件来说,通常使用.off文件进行保存,off是object file format的缩写,即物体文件格式的简称。其文件格式如下:
OFF
顶点数 面片数 边数
# 以下是顶点坐标
x y z
x y z
...
# 以下是每个面的顶点的索引和颜色
n个顶点 顶点1的索引 顶点2的索引 … 顶点n的索引 RGB颜色表示
...
比如常见的立方体格式为:
OFF
8 6 12
1.0 0.0 1.4142
0.0 1.0 1.4142
-1.0 0.0 1.4142
0.0 -1.0 1.4142
1.0 0.0 0.0
0.0 1.0 0.0
-1.0 0.0 0.0
0.0 -1.0 0.0
4 0 1 2 3 255 0 0 #red
4 7 4 0 3 0 255 0 #green
4 4 5 1 0 0 0 255 #blue
4 5 6 2 1 0 255 0
4 3 2 6 7 0 0 255
4 6 5 4 7 255 0 0
该文件的第一行8 6 12 代表有8个顶点,6个面和12条边;后面8行代表8个顶点的坐标;最后6行是6个面的上的顶点的索引和颜色。
2.读取方法
.off文件在Python中不需要额外解析,只需要正常打开逐行读取分析信息即可。
# 解压数据集
!unzip -oq /home/aistudio/data/data108288/ModelNet10.zip
import numpy as np
filename="ModelNet10/chair/train/chair_0001.off"
f = open(filename, 'r')
f.readline() # 第一行为OFF,跳过
num_views, num_groups, num_edges = map(int, f.readline().split())
print("该文件有{}个顶点,{}个面和{}条边".format(num_views, num_groups, num_edges))
view_data = [] # 保存所有顶点的坐标信息
for view_id in range(num_views):
view_data.append(list(map(float, f.readline().split())))
views = np.array(view_data)
print("所有顶点的坐标信息:\n{}".format(views))
f.close()
该文件有2382个顶点,2234个面和0条边
所有顶点的坐标信息:
[[ -9.6995 0.06625 -1.575088]
[ -9.6965 -8.83705 -18.008024]
[ -9.6995 -9.05255 -17.887559]
...
[ 9.3055 6.80925 -12.881839]
[ 9.3055 6.80925 -12.881839]
[ -9.1335 6.80925 -12.881839]]
3.点云可视化
为了直观地检查3D点云物体,可以通过可视化的方法进行验证。
可视化工具
MeshLab:https://www.meshlab.net/#download
MeshLab是一个用于处理和编辑三维点云的开源工具,通过它可以很方便地对.off文件进行可视化。
plt可视化
为了更方便地可视化3D点云文件,可以使用plt进行可视化。
import numpy as np
from mpl_toolkits import mplot3d
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
# 单独保存每个点的三维坐标
zdata = []
xdata = []
ydata = []
for point in views:
xdata.append(point[0])
ydata.append(point[1])
zdata.append(point[2])
xdata = np.array(xdata)
ydata = np.array(ydata)
zdata = np.array(zdata)
# 3D点云可视化
ax = plt.axes(projection='3d')
ax.scatter3D(xdata, ydata, zdata, c='r')
plt.show()

4.数据集定义
可以使用飞桨提供的paddle.io.Dataset基类,来快速实现自定义数据集。
import os
trainList = open("trainList.txt", "w") # 训练集
testList = open("testList.txt", "w") # 测试集
for root, dirs, files in os.walk("ModelNet10"):
for file in files:
if file.endswith(".off"):
if "train" in root:
trainList.writelines(os.path.join(root, file) + "\n")
elif "test" in root:
testList.writelines(os.path.join(root, file) + "\n")
trainList.close()
testList.close()
这里说明一下数据处理的思路。在做手写数字识别时,可以把二维矩阵每一行首尾相接,变成一维矩阵;同理,三维物体也可以把三个轴的坐标分别拿出来,变成一维矩阵。
import os
import numpy as np
import paddle
from paddle.io import Dataset
category = {
'bathtub': 0,
'bed': 1,
'chair': 2,
'desk': 3,
'dresser': 4,
'monitor': 5,
'night_stand': 6,
'sofa': 7,
'table': 8,
'toilet': 9
}
batch_size = 8
def ThreeDFolder(DataList):
filenameList = open(DataList, "r")
AllData = []
for filename in filenameList:
f = open(filename.split('\n')[0], 'r')
f.readline() # 第一行为OFF,跳过
num_views, num_groups, num_edges = map(int, f.readline().split())
view_data = [] # 保存所有顶点的坐标信息
for view_id in range(num_views):
view_data.append(list(map(float, f.readline().split())))
for _ in range(batch_size):
np.random.shuffle(view_data) # 数据增强
# 单独保存每个点的三维坐标
zdata = []
xdata = []
ydata = []
for point in view_data:
xdata.append(point[0])
ydata.append(point[1])
zdata.append(point[2])
xdata = np.array(xdata)
ydata = np.array(ydata)
zdata = np.array(zdata)
data = np.array([xdata, ydata, zdata])
label = np.array(category[filename.split('/')[1]])
AllData.append([data, label])
f.close()
return AllData
class ModelNetDataset(Dataset):
"""
步骤一:继承paddle.io.Dataset类
"""
def __init__(self, mode="Train"):
"""
步骤二:实现构造函数,定义数据读取方式,划分训练和测试数据集
"""
super(ModelNetDataset, self).__init__()
train_dir = '/home/aistudio/trainList.txt'
test_dir = '/home/aistudio/testList.txt'
self.mode = mode
train_data_folder = ThreeDFolder(DataList = train_dir)
test_data_folder = ThreeDFolder(DataList = test_dir)
if self.mode == "Train":
self.data = train_data_folder
elif self.mode == "Test":
self.data = test_data_folder
def __getitem__(self, index):
"""
步骤三:实现__getitem__方法,定义指定index时如何获取数据,并返回单条数据(训练数据,对应的标签)
"""
data = np.array(self.data[index][0]).astype('float32')
label = np.array([self.data[index][1]]).astype('int64')
return data, label
def __len__(self):
"""
步骤四:实现__len__方法,返回数据集总数目
"""
return len(self.data)
train_dataset = ModelNetDataset(mode="Train")
test_dataset = ModelNetDataset(mode="Test")
查看第一条数据,这是一个用3×N矩阵((3表示x、y和z轴;N表示N个坐标点))表示的3D物体:
print(train_dataset[0])
(array([[ 35.3296 , 30.6052 , 35.3296 , ..., 3.9075 , 4.1437 ,
4.1437 ],
[-89.62712, -89.62712, -89.62712, ..., 93.29006, 93.61506,
93.61506],
[ 16.1253 , 14.3143 , 14.3143 , ..., 14.4374 , 18.3374 ,
14.4374 ]], dtype=float32), array([0]))
三、模型组网与训练
在模型组网时,整体思路如下所示:
1.全卷积神经网络
全卷积神经网络,字面意思,就是只有卷积层的网络,因为没有线性变换层,因此可以接受任意大小的输入。
3D点云文件中,不同物体,其坐标点的个数是不同的,因此全卷积神经网络在处理这类问题时有很大的优势。
import paddle
import paddle.nn.functional as F
class Block1024(paddle.nn.Layer):
def __init__(self):
super(Block1024, self).__init__()
self.pool = paddle.nn.AdaptiveAvgPool1D(output_size=1024)
def forward(self, inputs):
x = F.sigmoid(inputs)
x = self.pool(x)
return x
class Block512(paddle.nn.Layer):
def __init__(self):
super(Block512, self).__init__()
self.pool = paddle.nn.AdaptiveAvgPool1D(output_size=512)
def forward(self, inputs):
x = F.sigmoid(inputs)
x = self.pool(x)
return x
class Block256(paddle.nn.Layer):
def __init__(self):
super(Block256, self).__init__()
self.pool = paddle.nn.AdaptiveAvgPool1D(output_size=256)
def forward(self, inputs):
x = F.sigmoid(inputs)
x = self.pool(x)
return x
class Block128(paddle.nn.Layer):
def __init__(self):
super(Block128, self).__init__()
self.pool = paddle.nn.AdaptiveMaxPool1D(output_size=10)
def forward(self, inputs):
x = F.sigmoid(inputs)
x = self.pool(x)
return x
class BlockOut(paddle.nn.Layer):
def __init__(self):
super(BlockOut, self).__init__()
self.conv = paddle.nn.Conv1D(in_channels=10, out_channels=1, kernel_size=3)
self.pool = paddle.nn.AdaptiveAvgPool1D(output_size=10)
def forward(self, inputs):
x = self.conv(inputs)
x = F.sigmoid(x)
x = self.pool(x)
return x
# Layer类继承方式组网
class ThreeDNet(paddle.nn.Layer):
def __init__(self):
super(ThreeDNet, self).__init__()
self.Block1024 = Block1024()
self.Block512 = Block512()
self.Block256 = Block256()
self.Block128 = Block128()
self.conv11 = paddle.nn.Conv1D(in_channels=3, out_channels=33, kernel_size=13)
self.conv7a = paddle.nn.Conv1D(in_channels=33, out_channels=99, kernel_size=11)
self.conv7b = paddle.nn.Conv1D(in_channels=33, out_channels=99, kernel_size=11)
self.conv5a = paddle.nn.Conv1D(in_channels=99, out_channels=297, kernel_size=7)
self.conv5b = paddle.nn.Conv1D(in_channels=99, out_channels=297, kernel_size=7)
self.conv5c = paddle.nn.Conv1D(in_channels=99, out_channels=297, kernel_size=7)
self.conv5d = paddle.nn.Conv1D(in_channels=99, out_channels=297, kernel_size=7)
self.conv5e = paddle.nn.Conv1D(in_channels=99, out_channels=297, kernel_size=7)
self.conv3a = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3b = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3c = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3d = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3e = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3f = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3g = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.conv3h = paddle.nn.Conv1D(in_channels=297, out_channels=10, kernel_size=5)
self.BlockOut = BlockOut()
def forward(self, inputs):
x11 = self.conv11(inputs)
a = self.Block1024(x11)
x7 = self.conv7a(x11)
b1 = self.Block512(x7)
b2 = self.Block512(self.conv7b(a))
xb = paddle.concat(x=[b1, b2], axis=-1)
x5 = self.conv5a(x7)
xb5 = self.conv5b(xb)
c1 = self.Block256(self.conv5c(b1))
c2 = self.Block256(self.conv5d(b2))
c3 = self.Block256(self.conv5e(xb))
c4 = self.Block256(x5)
c5 = self.Block256(xb5)
xc = paddle.concat(x=[c1, c2, c3, c4, c5], axis=-1)
x3 = self.conv3a(x5)
xbc3 = self.conv3b(xb5)
xc3 = self.conv3c(xc)
d1 = self.Block128(self.conv3d(c1))
d2 = self.Block128(self.conv3e(c2))
d3 = self.Block128(self.conv3f(c3))
d4 = self.Block128(self.conv3g(xc))
d5 = self.Block128(self.conv3h(xb5))
d6 = self.Block128(x3)
d7 = self.Block128(xbc3)
d8 = self.Block128(xc3)
xd = paddle.concat(x=[d1, d2, d3, d4, d5, d6, d7, d8], axis=-1)
output = self.BlockOut(xd)
return output
threeDNet = ThreeDNet()
2.查看网络结构
使用高层API查看网络结构,由于是全卷积神经网络,因此神经网络可以适配3D点云中点的个数,即坐标点的个数可以是任意的:
paddle.summary(threeDNet, (1, 3, 1024)) # (1, 3, N)N表示坐标点的个数,可以是的任意值(因为第一层卷积核为7,因此要大于或等于7,但实际中应该不存在只有7个点的点云)
-------------------------------------------------------------------------------
Layer (type) Input Shape Output Shape Param #
===============================================================================
Conv1D-1 [[1, 3, 1024]] [1, 33, 1012] 1,320
AdaptiveAvgPool1D-1 [[1, 33, 1012]] [1, 33, 1024] 0
Block1024-1 [[1, 33, 1012]] [1, 33, 1024] 0
Conv1D-2 [[1, 33, 1012]] [1, 99, 1002] 36,036
AdaptiveAvgPool1D-2 [[1, 99, 1014]] [1, 99, 512] 0
Block512-1 [[1, 99, 1014]] [1, 99, 512] 0
Conv1D-3 [[1, 33, 1024]] [1, 99, 1014] 36,036
Conv1D-4 [[1, 99, 1002]] [1, 297, 996] 206,118
Conv1D-5 [[1, 99, 1024]] [1, 297, 1018] 206,118
Conv1D-6 [[1, 99, 512]] [1, 297, 506] 206,118
AdaptiveAvgPool1D-3 [[1, 297, 1018]] [1, 297, 256] 0
Block256-1 [[1, 297, 1018]] [1, 297, 256] 0
Conv1D-7 [[1, 99, 512]] [1, 297, 506] 206,118
Conv1D-8 [[1, 99, 1024]] [1, 297, 1018] 206,118
Conv1D-9 [[1, 297, 996]] [1, 10, 992] 14,860
Conv1D-10 [[1, 297, 1018]] [1, 10, 1014] 14,860
Conv1D-11 [[1, 297, 1280]] [1, 10, 1276] 14,860
Conv1D-12 [[1, 297, 256]] [1, 10, 252] 14,860
AdaptiveMaxPool1D-1 [[1, 10, 1276]] [1, 10, 10] 0
Block128-1 [[1, 10, 1276]] [1, 10, 10] 0
Conv1D-13 [[1, 297, 256]] [1, 10, 252] 14,860
Conv1D-14 [[1, 297, 256]] [1, 10, 252] 14,860
Conv1D-15 [[1, 297, 1280]] [1, 10, 1276] 14,860
Conv1D-16 [[1, 297, 1018]] [1, 10, 1014] 14,860
Conv1D-17 [[1, 10, 80]] [1, 1, 78] 31
AdaptiveAvgPool1D-4 [[1, 1, 78]] [1, 1, 10] 0
BlockOut-1 [[1, 10, 80]] [1, 1, 10] 0
===============================================================================
Total params: 1,222,893
Trainable params: 1,222,893
Non-trainable params: 0
-------------------------------------------------------------------------------
Input size (MB): 0.01
Forward/backward pass size (MB): 13.88
Params size (MB): 4.66
Estimated Total Size (MB): 18.55
-------------------------------------------------------------------------------
{'total_params': 1222893, 'trainable_params': 1222893}
3.模型训练
# 用 DataLoader 实现数据加载
train_loader = paddle.io.DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
# mnist=Mnist()
threeDNet.train()
# 设置迭代次数
epochs = 100
# 设置优化器
lr = paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=0.00025, T_max=int(train_dataset.__len__() * epochs / 128))
optim = paddle.optimizer.Momentum(learning_rate=lr, parameters=threeDNet.parameters(), weight_decay=1e-5)
# 设置损失函数
loss_fn = paddle.nn.CrossEntropyLoss()
# 评估指标
BestAcc = 0
for epoch in range(epochs):
acc = 0
loss = 0
count = 0
for batch_id, data in enumerate(train_loader()):
x_data = data[0] # 训练数据
y_data = data[1] # 训练数据标签
predicts = threeDNet(x_data) # 预测结果
# 计算损失 等价于 prepare 中loss的设置
loss += loss_fn(predicts, y_data)
# 计算准确率 等价于 prepare 中metrics的设置
acc += paddle.metric.accuracy(predicts, y_data)
if count >= 128:
# 反向传播
loss.backward()
# 更新参数
optim.step()
# 梯度清零
optim.clear_grad()
count = 0
count += 1
loss.backward()
optim.step()
optim.clear_grad()
print("epoch: {}, batch_id: {}, loss is: {}, acc is: {}".format(epoch, batch_id+1, loss.numpy()/train_dataset.__len__(), acc.numpy()/train_dataset.__len__()))
if acc.numpy()/train_dataset.__len__() > BestAcc:
state_dict = threeDNet.state_dict()
# save state_dict of threeDNet
paddle.save(state_dict, "threeDNet/threeDNet.pdparams")
BestAcc = acc.numpy()/train_dataset.__len__()
部分训练日志截取:
epoch: 0, batch_id: 3991, loss is: [2.2351303], acc is: [0.19418693]
epoch: 1, batch_id: 3991, loss is: [2.1812398], acc is: [0.22275119]
epoch: 2, batch_id: 3991, loss is: [2.1573942], acc is: [0.22625908]
epoch: 3, batch_id: 3991, loss is: [2.138466], acc is: [0.24805813]
epoch: 4, batch_id: 3991, loss is: [2.1174479], acc is: [0.2731145]
epoch: 5, batch_id: 3991, loss is: [2.1015415], acc is: [0.29766977]
epoch: 6, batch_id: 3991, loss is: [2.0876462], acc is: [0.331997]
epoch: 7, batch_id: 3991, loss is: [2.0767505], acc is: [0.3755951]
epoch: 8, batch_id: 3991, loss is: [2.0677485], acc is: [0.41618642]
epoch: 9, batch_id: 3991, loss is: [2.0585632], acc is: [0.43172136]
epoch: 10, batch_id: 3991, loss is: [2.0521076], acc is: [0.4550238]
... ...
epoch: 95, batch_id: 3991, loss is: [1.8270358], acc is: [0.72788775]
epoch: 96, batch_id: 3991, loss is: [1.8227352], acc is: [0.72563267]
epoch: 97, batch_id: 3991, loss is: [1.8221083], acc is: [0.73189676]
epoch: 98, batch_id: 3991, loss is: [1.8253901], acc is: [0.71961915]
epoch: 99, batch_id: 3991, loss is: [1.8208766], acc is: [0.72588325]
四、测试效果评估
# 加载模型权重
threeDNet_PATH = "threeDNet/threeDNet.pdparams"
threeDNet_state_dict = paddle.load(threeDNet_PATH)
threeDNet.set_dict(threeDNet_state_dict)
threeDNet.eval()
# 加载测试集
test_loader = paddle.io.DataLoader(test_dataset, batch_size=1)
1.批量测试
loss_fn = paddle.nn.CrossEntropyLoss()
loss = 0
acc = 0
count = 0
for batch_id, data in enumerate(test_loader()):
if count > 500: # 只取前500条数据,数据过多会内存溢出
break
x_data = data[0] # 测试数据
y_data = data[1] # 测试数据标签
predicts = threeDNet(x_data)# 预测结果
# 计算损失与精度
loss += loss_fn(predicts, y_data)
acc += paddle.metric.accuracy(predicts, y_data)
count += 1
# 打印信息
print("loss is: {}, acc is: {}".format(loss.numpy()/count, acc.numpy()/count))
loss is: [1.8510753], acc is: [0.7185629]
2.逐个测试
取某一条数据进行可视化,更直观地检测模型效果:
import numpy as np
from mpl_toolkits import mplot3d
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
index = 0
for batch_id, data in enumerate(test_loader()):
if batch_id != index:
continue
x_data = data[0] # 测试数据
y_data = data[1] # 测试数据标签
predicts = threeDNet(x_data)# 预测结果
# 可视化
xdata = np.array(data[0][0][0])
ydata = np.array(data[0][0][1])
zdata = np.array(data[0][0][2])
# 3D点云可视化
ax = plt.axes(projection='3d')
ax.scatter3D(xdata, ydata, zdata, c='r')
plt.show()
print("该3D点云物体的期望结果是{},实际结果是{}".format([k for k,v in category.items() if v == int(y_data)], [k for k,v in category.items() if v == np.argsort(predicts[0][0][-1][0])]))

该3D点云物体的期望结果是['bathtub'],实际结果是['bathtub']
五、总结与升华
本项目是对3D点云物体识别的尝试,在数据处理和模型组网的时候,我花了较多的时间。
特别是模型组网,我设计了一个全卷积神经网络来识别3D点云物体,刚开始设计的网络比较小,识别的效果并不理想,后来,我把卷积核增大,并加深网络以及加上跳连,使模型有一个较好的拟合效果。
作者简介
北京联合大学 机器人学院 自动化专业 2018级 本科生 郑博培
中国科学院自动化研究所复杂系统管理与控制国家重点实验室实习生
百度飞桨开发者技术专家 PPDE
百度飞桨北京领航团团长
百度飞桨官方帮帮团、答疑团成员
深圳柴火创客空间 认证会员
百度大脑 智能对话训练师
阿里云人工智能、DevOps助理工程师










