先总结总结问题
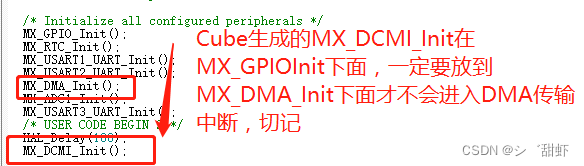
问题1:MX_DCMI_Init();放到 MX_DMA_Init();后
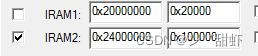
问题2:DMA缓存缓存要放到SRAM中__align(32) uint32_t buffer[65535] __attribute((at(0X24040000)));
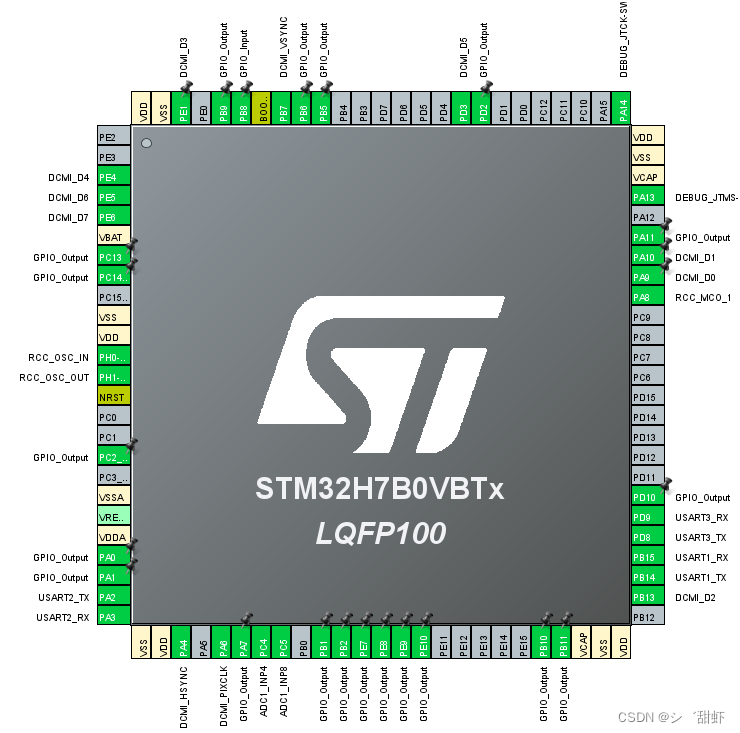
问题3:IO复用问题,DCMI数据口可以复用到其他IO口,要注意配置
问题4:摄像头时钟配置,不能过快,也不能过慢,过快采集不过来,过慢JPEG会传一半停止
问题5:上位机字节序,JPG由FF D8开头,FF D9结尾
解决上面5个问题,STM32H7 DCMI就可以轻松使用
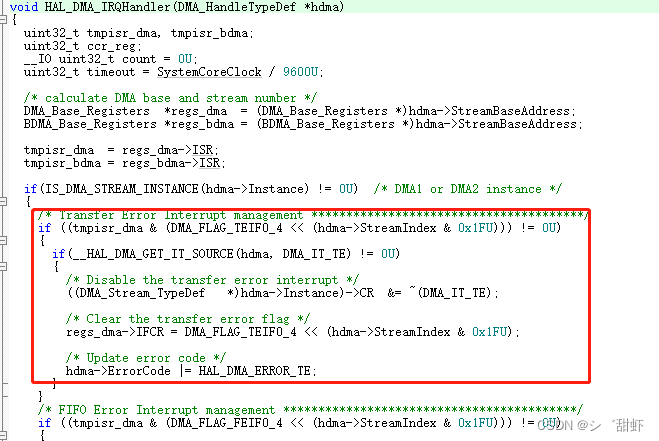
由于需要用到摄像头,用IO驱动的话会比较慢,这里使用的STM32H7B0中的DCMI接口,由于DMA用的比较少,在这里卡了3天,期间各种测试,从硬件到软件,接用IO读OV2640,可以读到数据,确定硬件没有问题,DCMI的DMA一直进错误中断Transfer Error Interrupt management
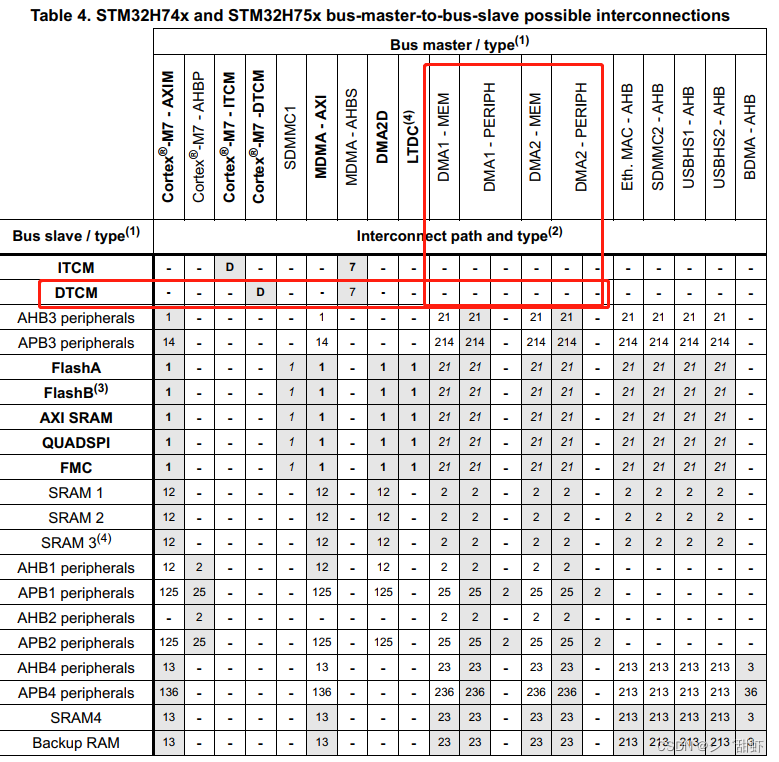
网上说是内存地址问题,DMA不能访问直接访问DTCM,也改成SRAM了,也会进入错误中断
DMA1等都不能访问DTCM
最终发现把 MX_DCMI_Init();放到 MX_DMA_Init();即可正常传输数据
Several peripheral DMA handle pointers point to the same DMA handle.
Be aware that there is only one channel to perform all the requested DMAs.干扰项,删掉就行不用管,我开始还以为这里需要配置什么东西,就保留最上边一行

删完就像这样就可以

缓存放到SRAM放到中
__align(32) uint32_t buffer[65535] __attribute((at(0X24040000)));
开启缓存对于DCMI没有影响,开不开都可以正常运行
static void CPU_CACHE_Enable(void)
{
SCB_EnableICache();//使能I-Cache
SCB_EnableDCache();//使能D-Cache
SCB->CACR|=1<<2; //强制D-Cache透写,如不开启,实际使用中可能遇到各种问题
}
启动采集代码
void StartOV2640()
{
int i =0;
__HAL_DCMI_ENABLE_IT(&hdcmi, DCMI_IER_FRAME_IE); //使用帧中断
memset(buffer, 0, 65535); //把接收BUF清空
HAL_DCMI_Start_DMA(&hdcmi, DCMI_MODE_SNAPSHOT, (uint32_t)buffer, 65535); //启动拍照
}
void HAL_DCMI_FrameEventCallback(DCMI_HandleTypeDef *hdcmi)
{
int i =0;
HAL_DCMI_Suspend(hdcmi); // 拍照完成,挂起 DCMI
HAL_DCMI_Stop(hdcmi); // 拍照完成,停止 DMA传输
int pictureLength = 65535;
while (pictureLength > 0) //循环计算出接收的JPEG的大小
{
if (buffer[pictureLength - 1] != 0x00000000)
{
break;
}
pictureLength--;
}
jpeglen = pictureLength * 4;
getPicture = 1;
}
配置IO也要注意一下D0,D1,D3可以复用到其他IO,一定不要弄错,配置完要对着IO检查一遍,频率使用也很重要,我这里用到的频率如下
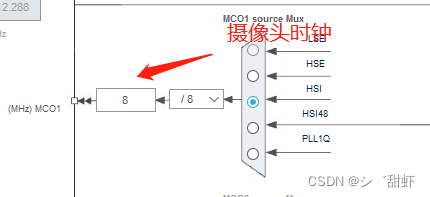
单片机主频280M
摄像头主频8M
摄像头分频配置
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XD3,0XF);
SCCB_WR_Reg(0XFF,0X01);
SCCB_WR_Reg(0X11,0X7);
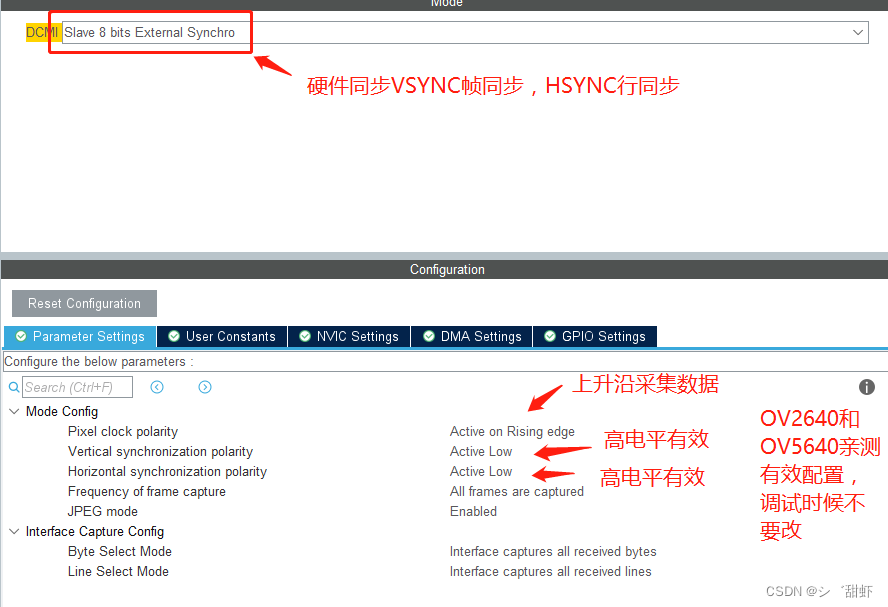
开启中断

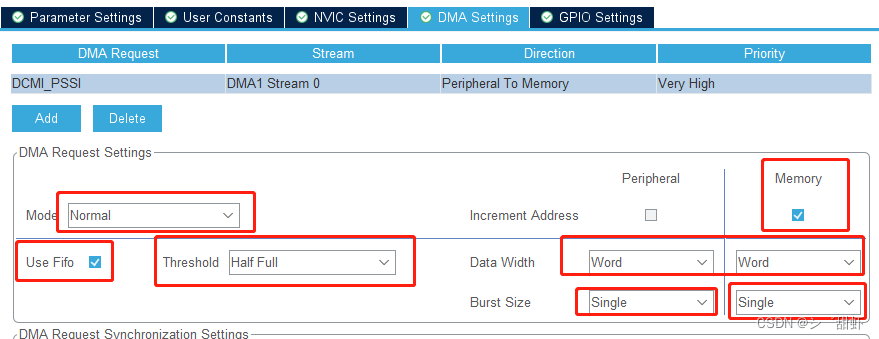
DMA配置,不要修改
NVIC给个优先级

摄像头时钟,这个可以自由发挥,和摄像头分频配置一起可以有多重组合
样张
上位机软件用C#写的,关键部分代码
private const int count = 200 * 1024;
private byte[] buffer = new byte[count];
private int offset = 0;
private int length = 0;
private bool isData = false;
public void DataCallBack(Object sender, SerialDataReceivedEventArgs e)
{
try
{
if (isData==false)
{
var data = _serialPort.ReadLine();
if (!string.IsNullOrEmpty(data) && data.Length > 0)
{
if(data.IndexOf("jpeg data size:")>=0)
{
var lengthStr = data.Split(':');
if(lengthStr != null && lengthStr.Length>1)
{
length = int.Parse(lengthStr[1]);
if (length > count)
{
}
else
{
isData = true;
}
}
Console.WriteLine(data);
}
else
{
Console.WriteLine(data);
}
}
}
else
{
int thisLength = _serialPort.Read(buffer, offset, length - offset);
offset = offset + thisLength;
if(offset >= length)
{
Console.WriteLine($"接收完一张图片,offset:{offset},length:{length}");
string path = Directory.GetCurrentDirectory();
DirectoryCheak(path + "\\out\\");
bool ispictrue = false;
if (false)//bmp
{
//bmp
if (false)
{
//RGB888
System.Drawing.Bitmap formBitmap = new System.Drawing.Bitmap(96, 96);
for (int i = 0; i < 96; i++)
{
for (int j = 0; j < 96; j++)
{
formBitmap.SetPixel(i, j, System.Drawing.Color.FromArgb(buffer[i * j + j], buffer[i * j + j + 1], buffer[i * j + j + 2]));
}
}
formBitmap.Save(path + "\\out\\" + DateTime.Now.ToString("yyyyMMdd-HHmmss.fff") + ".bmp");
}
else
{
//RGB565
List<UInt16> data = new List<UInt16>();
for (int i = 0; i < length; i += 2)
{
UInt16 thisData = (UInt16)((buffer[i] << 8) | buffer[i + 1]); ;
data.Add(thisData);
}
System.Drawing.Bitmap formBitmap = new System.Drawing.Bitmap(96, 96);
for (int i = 0; i < 96; i++)
{
for (int j = 0; j < 96; j++)
{
byte red = (byte)((data[i * j + j] >> 11) << 3); //5位 移动3位
byte green = (byte)(((data[i * j + j] << 5) >> 10) << 2); //6位 移动2位
byte blue = (byte)(((data[i * j + j] << 11) >> 11) << 3); //5位 移动3位
formBitmap.SetPixel(i, j, System.Drawing.Color.FromArgb(red, green, blue));
}
}
formBitmap.Save(path + "\\out\\" + DateTime.Now.ToString("yyyyMMdd-HHmmss.fff") + ".bmp");
}
}
else
{
List<byte> data = new List<byte>();
for (int i = 1; i < length; i++)
{
//Console.WriteLine($"i:{i},length:{length}");
if (ispictrue == true)
{
data.Add(buffer[i]);
}
else if ((buffer[i - 1] == 0xFF) && (buffer[i] == 0xd8))
{
ispictrue = true;
data.Add(buffer[i - 1]);
data.Add(buffer[i]);
}
//if((buffer[i - 1] == 0xFF) && (buffer[i] == 0xd9))
//{
// data.Add(buffer[i - 1]);
// data.Add(buffer[i]);
// ispictrue = false;
// break;
//}
}
WriteFileUsingBinaryWriter(path + "\\out\\", DateTime.Now.ToString("yyyyMMdd-HHmmss.fff") + ".jpg", data.ToArray(), data.Count());
}
offset = 0;
length = 0;
isData = false;
}
}
}
catch (Exception ex)
{
Console.WriteLine("串口解析出错" + ex.ToString());
}
}
public void WriteFileUsingBinaryWriter(string path,string fileName,byte[] data,int length)
{
var outputStream = File.Create(path + fileName);
using (var writer = new BinaryWriter(outputStream))
{
writer.Write(data, 0, length);
}
}
/// <summary>
/// 效验文件夹,没有就创建
/// </summary>
private void DirectoryCheak(string path)
{
if (false == System.IO.Directory.Exists(path))
{
System.IO.Directory.CreateDirectory(path);
}
}
private void OpenSerialPort_Click(object sender, RoutedEventArgs e)
{
try
{
_serialPort = new SerialPort();
_serialPort.PortName = SerialPort.Text;
_serialPort.BaudRate = int.Parse(SerialBaudRate.Text);
_serialPort.Parity = Parity.None;
_serialPort.DataBits = 8;
_serialPort.StopBits = StopBits.One;
_serialPort.ReadTimeout = 10000;//单位毫秒
_serialPort.WriteTimeout = 10000;//单位毫秒
//设置串口字节接收缓冲值,通常为1
//获得接收后,触发事件处理
_serialPort.ReceivedBytesThreshold = 1;
_serialPort.DataReceived += new SerialDataReceivedEventHandler(DataCallBack);
_serialPort.Open();//Console.WriteLine(serialPort.IsOpen.ToString());
OpenSerialPort.IsEnabled = false;
CloseSerialPort.IsEnabled = true;
}
catch (Exception ex)
{
MessageBox.Show("串口打开失败" + ex.ToString());
//System.Environment.Exit(0);//退出应用程序
}
}
private void CloseSerialPort_Click(object sender, RoutedEventArgs e)
{
try
{
if (_serialPort.IsOpen == true)
{
_serialPort.Close();
OpenSerialPort.IsEnabled = true;
CloseSerialPort.IsEnabled = false;
}
}
catch (Exception ex)
{
MessageBox.Show("串口关闭失败" + ex.ToString());
System.Environment.Exit(0);//退出应用程序
}
}
单片机关键部分代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file dcmi.c
* @brief This file provides code for the configuration
* of the DCMI instances.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "dcmi.h"
/* USER CODE BEGIN 0 */
#include <string.h>
#include <stdio.h>
__align(32) uint32_t buffer[65535] __attribute((at(0X24040000)));
unsigned char getPicture = 0;
unsigned int jpeglen = 0;
//unsigned int recvOk = 0;
/* USER CODE END 0 */
DCMI_HandleTypeDef hdcmi;
DMA_HandleTypeDef hdma_dcmi_pssi;
/* DCMI init function */
void MX_DCMI_Init(void)
{
/* USER CODE BEGIN DCMI_Init 0 */
/* USER CODE END DCMI_Init 0 */
/* USER CODE BEGIN DCMI_Init 1 */
/* USER CODE END DCMI_Init 1 */
hdcmi.Instance = DCMI;
hdcmi.Init.SynchroMode = DCMI_SYNCHRO_HARDWARE;
hdcmi.Init.PCKPolarity = DCMI_PCKPOLARITY_RISING;
hdcmi.Init.VSPolarity = DCMI_VSPOLARITY_LOW;
hdcmi.Init.HSPolarity = DCMI_HSPOLARITY_LOW;
hdcmi.Init.CaptureRate = DCMI_CR_ALL_FRAME;
hdcmi.Init.ExtendedDataMode = DCMI_EXTEND_DATA_8B;
hdcmi.Init.JPEGMode = DCMI_JPEG_ENABLE;
hdcmi.Init.ByteSelectMode = DCMI_BSM_ALL;
hdcmi.Init.ByteSelectStart = DCMI_OEBS_ODD;
hdcmi.Init.LineSelectMode = DCMI_LSM_ALL;
hdcmi.Init.LineSelectStart = DCMI_OELS_ODD;
if (HAL_DCMI_Init(&hdcmi) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN DCMI_Init 2 */
//printf("MX_DCMI_Init ok\r\n");
/* USER CODE END DCMI_Init 2 */
}
void HAL_DCMI_MspInit(DCMI_HandleTypeDef* dcmiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(dcmiHandle->Instance==DCMI)
{
/* USER CODE BEGIN DCMI_MspInit 0 */
//printf("if(dcmiHandle->Instance==DCMI)\r\n");
/* USER CODE END DCMI_MspInit 0 */
/* DCMI clock enable */
__HAL_RCC_DCMI_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/**DCMI GPIO Configuration
PE4 ------> DCMI_D4
PE5 ------> DCMI_D6
PE6 ------> DCMI_D7
PA4 ------> DCMI_HSYNC
PA6 ------> DCMI_PIXCLK
PB13 ------> DCMI_D2
PA9 ------> DCMI_D0
PA10 ------> DCMI_D1
PD3 ------> DCMI_D5
PB7 ------> DCMI_VSYNC
PE1 ------> DCMI_D3
*/
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_6|GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/* DCMI DMA Init */
/* DCMI_PSSI Init */
hdma_dcmi_pssi.Instance = DMA1_Stream0;
hdma_dcmi_pssi.Init.Request = DMA_REQUEST_DCMI_PSSI;
hdma_dcmi_pssi.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_dcmi_pssi.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_dcmi_pssi.Init.MemInc = DMA_MINC_ENABLE;
hdma_dcmi_pssi.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_dcmi_pssi.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_dcmi_pssi.Init.Mode = DMA_NORMAL;
hdma_dcmi_pssi.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_dcmi_pssi.Init.FIFOMode = DMA_FIFOMODE_ENABLE;
hdma_dcmi_pssi.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_HALFFULL;
hdma_dcmi_pssi.Init.MemBurst = DMA_MBURST_SINGLE;
hdma_dcmi_pssi.Init.PeriphBurst = DMA_PBURST_SINGLE;
if (HAL_DMA_Init(&hdma_dcmi_pssi) != HAL_OK)
{
Error_Handler();
}
/* Several peripheral DMA handle pointers point to the same DMA handle.
Be aware that there is only one channel to perform all the requested DMAs. */
__HAL_LINKDMA(dcmiHandle,DMA_Handle,hdma_dcmi_pssi);
/* DCMI interrupt Init */
HAL_NVIC_SetPriority(DCMI_PSSI_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(DCMI_PSSI_IRQn);
/* USER CODE BEGIN DCMI_MspInit 1 */
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_RESET);
//printf("HAL_DCMI_MspInit ok\r\n");
/* USER CODE END DCMI_MspInit 1 */
}
}
void HAL_DCMI_MspDeInit(DCMI_HandleTypeDef* dcmiHandle)
{
if(dcmiHandle->Instance==DCMI)
{
/* USER CODE BEGIN DCMI_MspDeInit 0 */
/* USER CODE END DCMI_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_DCMI_CLK_DISABLE();
/**DCMI GPIO Configuration
PE4 ------> DCMI_D4
PE5 ------> DCMI_D6
PE6 ------> DCMI_D7
PA4 ------> DCMI_HSYNC
PA6 ------> DCMI_PIXCLK
PB13 ------> DCMI_D2
PA9 ------> DCMI_D0
PA10 ------> DCMI_D1
PD3 ------> DCMI_D5
PB7 ------> DCMI_VSYNC
PE1 ------> DCMI_D3
*/
HAL_GPIO_DeInit(GPIOE, GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_1);
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_4|GPIO_PIN_6|GPIO_PIN_9|GPIO_PIN_10);
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_13|GPIO_PIN_7);
HAL_GPIO_DeInit(GPIOD, GPIO_PIN_3);
/* DCMI DMA DeInit */
HAL_DMA_DeInit(dcmiHandle->DMA_Handle);
/* DCMI interrupt Deinit */
HAL_NVIC_DisableIRQ(DCMI_PSSI_IRQn);
/* USER CODE BEGIN DCMI_MspDeInit 1 */
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);
HAL_Delay(100);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_RESET);
printf("HAL_DCMI_MspDeInit ok\r\n");
/* USER CODE END DCMI_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void StartOV2640()
{
int i =0;
__HAL_DCMI_ENABLE_IT(&hdcmi, DCMI_IER_FRAME_IE); //使用帧中断
memset(buffer, 0, 65535); //把接收BUF清空
HAL_DCMI_Start_DMA(&hdcmi, DCMI_MODE_SNAPSHOT, (uint32_t)buffer, 65535); //启动拍照
}
void HAL_DCMI_FrameEventCallback(DCMI_HandleTypeDef *hdcmi)
{
int i =0;
HAL_DCMI_Suspend(hdcmi); // 拍照完成,挂起 DCMI
HAL_DCMI_Stop(hdcmi); // 拍照完成,停止 DMA传输
int pictureLength = 65535;
while (pictureLength > 0) //循环计算出接收的JPEG的大小
{
if (buffer[pictureLength - 1] != 0x00000000)
{
break;
}
pictureLength--;
}
jpeglen = pictureLength * 4;
getPicture = 1;
}
/* USER CODE END 1 */
单片机代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "dcmi.h"
#include "dma.h"
#include "rtc.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include "ov2640.h"
#include "ov5640.h"
#include <string.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#define OV2640_JPEG_WIDTH 1600 //JPEG拍照的宽度
#define OV2640_JPEG_HEIGHT 1200 //JPEG拍照的高度
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
PUTCHAR_PROTOTYPE
{
USART1->TDR = ch;
while(!(USART1->ISR& USART_ISR_TXE_TXFNF_Msk))
{;}
return ch;
}
static void CPU_CACHE_Enable(void)
{
SCB_EnableICache();//使能I-Cache
SCB_EnableDCache();//使能D-Cache
SCB->CACR|=1<<2; //强制D-Cache透写,如不开启,实际使用中可能遇到各种问题
}
void Send(uint8_t *pData)
{
uint32_t i = 0;
printf("jpeg data size:%d\r\n",jpeglen);//串口打印JPEG文件大小
HAL_Delay(1000);
for(i = 0;i < jpeglen;i++)
{
//printf("%02x\t",pData[i]);
printf("%c",pData[i]);
}
HAL_Delay(1000);
printf("\r\n");
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint32_t i = 0;
uint32_t index = 1;
//CPU_CACHE_Enable();
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
HAL_Delay(5000);
//__enable_irq();
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_RTC_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_USART3_UART_Init();
/* USER CODE BEGIN 2 */
HAL_Delay(100);
MX_DCMI_Init();
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
HAL_Delay(1000);
// HAL_DCMI_DeInit(&hdcmi);
// PY_DCMI_Full_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
printf("OV2640 初始化!cam:%d\r\n",index);
while(OV2640_Init(index))
{
printf("OV2640 错误!cam:%d\r\n",index);
}
printf("OV2640 成功!cam:%d\r\n",index);
HAL_Delay(1000);
if(1)
{
OV2640_JPEG_Mode(); //切换为JPEG模式
printf("切换为JPEG模式 !\r\n");
OV2640_OutSize_Set(OV2640_JPEG_WIDTH,OV2640_JPEG_HEIGHT);
printf("设置图像大小 !\r\n");
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XD3,0X10);
SCCB_WR_Reg(0XFF,0X01);
SCCB_WR_Reg(0X11,0X8);
}
if(0)
{
OV2640_RGB565_Mode(); //RGB565模式
printf("RGB565模式 !\r\n");
OV2640_OutSize_Set(OV2640_JPEG_WIDTH,OV2640_JPEG_HEIGHT);
printf("设置图像大小 !\r\n");
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XD3,0X12); //设置PCLK分频
SCCB_WR_Reg(0XFF,0X01);
SCCB_WR_Reg(0X11,0X1); //设置CLK分频
}
printf("开始工作\r\n");
HAL_Delay(100);
//Get_Photo();
//DCMI_Start();
StartOV2640();
HAL_Delay(1000);
while(1)
{
if(getPicture==1)
{
Send((uint8_t *)buffer);
break;
}
else
{
//printf("adc start\r\n");
//GetValue();
//printf("adc end\r\n");
HAL_Delay(10);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);
HAL_Delay(10);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_RESET);
}
//printf("jpeg haven't finished\r\n");
}
if(index>3)
{
index = 1;
}
else
{
index++;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Macro to configure the PLL clock source
*/
__HAL_RCC_PLL_PLLSOURCE_CONFIG(RCC_PLLSOURCE_HSI);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;
RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 35;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_3;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_7) != HAL_OK)
{
Error_Handler();
}
HAL_RCC_MCOConfig(RCC_MCO1, RCC_MCO1SOURCE_HSI, RCC_MCODIV_8);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
printf("Error_Handler\r\n");
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
HAL_Delay(1000);
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */









