
基于解释的学习(explanation-basedlearning)可简称为解释学习,是20世纪80年代中期开始兴起的一种机器学习方法。解释学习根据任务所在领域知识和正在学习的概念知识,对当前实例进行分析和求解,得出一个表征求解过程的因果解释树,以获取新的知识。在获取新知识的过程中,通过对属性、表征现象和内在关系等进行解释而学习到新的知识。
01、解释学习过程和算法
解释学习一般包括下列3个步骤。
(1) 利用基于解释的方法对训练实例进行分析与解释,以说明它是目标概念的一个实例。
(2) 对实例的结构进行概括性解释,建立该训练实例的一个解释结构,以满足所学概 念的定义;解释结构的各个叶子结点应符合可操作性准则,且使这种解释比最初的例子适用于更大的一类例子。
(3) 从解释结构中识别出训练实例的特性,并从中得到更大一类例子的概括性描述,获取一般控制知识。
解释学习是把现有的不能用或不实用的知识转化为可用的形式,因此必须了解目标概念的初始描述。
1986年,Mitchell等人为基于解释的学习提出了基于解释的概括 (Explanation-BasedGeneralization,EBG)算法,该算法建立了基于解释的概括过程,并运用知识的逻辑表示和演绎推理进行问题求解。
EBG 过程如图1所示,其求解问题的形式可描述如下。

图1 EBG过程
给定:
(1) 目标概念(要学习的概念)(GoalConcept,TC)描述。
(2) 训练实例(目标概念的一个实)(TrainingExample,TE)。
(3) 领域知识(由一组规则和事实组成的用于解释训练实例的知识库)(Domain Theory,DT)。
(4) 可操作性准则 (说明概念描述应具有的形式化谓词公式)(Operationality Criterion,OC)
求解:
训练实例的一般化概括,使之满足:
(1) 目标概念的充分概括描述 TC。
(2) 可操作性准则 OC。
其中,领域知识(DT)是相关领域的事实和规则,在学习系统中作为背景知识,用于证明训练实例(TE)为什么可以作为目标概念的一个实例,从而形成相应的解释。
TE 是为学习系统提供的一个例子,在学习过程中起着重要的作用,它应能充分地说明 TC。
操作准则 (OC)用于指导学习系统对目标概念进行取舍,使得通过学习产生的关于 TC的一般性描述成为可用的一般性知识。
从上述描述中可以看出,在解释学习中,为了对某一目标概念进行学习,从而得到相 应的知识,必须为学习系统提供完善的领域知识以及能够说明目标概念的一个训练实例。
在系统进行学习时,首先运用 DT 找出 TE为什么是 TC之实例的证明(即解释),然后根据 OC对证明进行推广。从而得到关于 TC的一般性描述。即可供以后使用的形式化表示的一般性知识。
可把 EBG 算法分为解释和概括两步。
(1) 解释,即根据领域知识建立一个解释,以证明训练实例如何满足目标概念定义。目标概念的初始描述通常是不可操作的。
(2) 概括,即对第(1)步的证明树进行处理,对目标概念进行回归,包括用变量代替常量以及必要的新项合成等工作,从而得到所期望的概念描述。
由上可知,解释工作是将实例的相关属性与无关属性分离开;概括工作则是分析解释结果。
02、案例:通过EBG学习概念cup
下面以学习概念cup(杯子)为例说明 EBG(基于解释的概括方法)的学习过程。
(1) 目标概念:cup。
(2) 高级描述:cup(x)。
(3) 领域知识:
stable(x)∧liftable(x)∧drinkfrom(x)→cup(x)
has(x,y)∧concavity(y)∧upward-pointing(y)→drinkfrom(x)
bottom(x,y)∧flat(y)→stable(x) light-weight(x)∧graspable(x)→liftable(x)
small(x)∧madefrom(x,plastic)→light-weight(x) has(x,y)∧handle(y)→graspable(x)
(部分中文解释:stable稳定的;liftable 便于拿起;drinkfrom 可用来喝饮料;concavity凹空;upward-pointing 向上指示;bottom 底;flat平坦的;light-weight轻质;graspable可握住;plastic塑胶。)
(4) 训练例子:
small(obj),madefrom(obj,plastic),has(obj,part1),handle(part1),has(obj,part2),concavity(part2),upward-pointing(part2),bottom(obj,b),flat(b)。
(5) 可操作性准则:目标概念必须以系统可识别的物理特征描述。
利用以上规则和事实,以cup(obj)为目标逆向推理,可以构造如图2(a)所示的解释结构,其叶子结点满足可操作性准则。
对解释进行概括,变常量为变量,便得到概括后的解释结构。
将此结构中的所有叶子结点作合取,就得到目标概念应满足的一般性的充分条件,以产生式规则形式表示为
IF small(V3)∧made-from(V3,plastic)∧
has(V3,V10)∧handle(V10)∧has(V3,V25) ∧
concavity(V25)∧upward-pointing(V25)∧
bottom(V3,V37)∧flat(V37)
THEN cup(V3)……(图2(b))
学到这条规则就是 EBG 的目的。
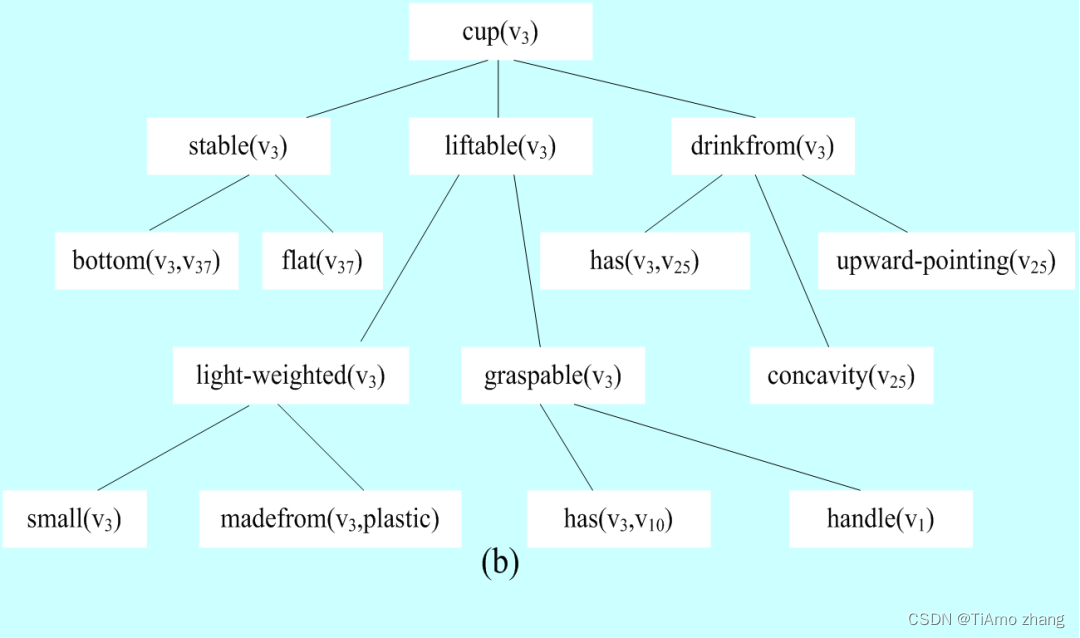
(a)解释结构
(b)形成规则
图2 EBG的学习过程
03、文末送书
◆ 内容简介◆
至少从 20 世纪 50 年代起,人们就开始大肆宣传可能很快就会创造出一种能够与人类智能的全部范围和水平相匹配的机器。现在,我们已经成功地创造出了能够解决特定问题的机器,其准确度达到甚至超过了人类,但我们仍然无法获得通用智能。这本书想和大家探讨一下还需要做什么样的努力才能不仅获得专用智能,还能获得通用智能。
如果读者对智能感兴趣,想了解更多关于如何建造自主机器的知识,或者担心这些机器突然有一天会以一种被称为“技术奇点”的方式统治世界,请阅读本书。
通过阅读本书,读者将会了解到:
尽管人工智能已经变得越来越复杂而强大,但计算机科学还远未创造出通用人工智能。
人类自然智能的认知机理以及人工智能发展的初心与使命,从不同方面认知当前人工智能技术的不足。
从当前“专用人工智能”到实现真正的“通用人工智能”还需要在哪些方面取得突破。
机器智能的进步可能会改变人们从事的工作类型,但它们不会意味着人类存在的终结。
为什么机器智能的改进并不会导致由机器所主导的失控性革命,机器智能的进步并不会导致世界末日的到来。
◆ 作者简介◆
赫伯特·L.罗埃布莱特
(Herbert L. Roitblat)
加州大学伯克利分校心理学博士,曾在夏威夷大学任教多年,现为Mimecast公司首席数据科学家。他在信息技术创新的各个方面具有广泛的经验,是技术企业家、发明家和专家,同时也是认知科学、信息检索、深度学习、电子发现、机器学习、神经网络、信息治理、自然语言处理等领域的专家。
◆ 译者简介◆
郭斌
工学博士,西北工业大学计算机学院教授/博导,国家杰出青年科学基金获得者,国家“万人计划”青年拔尖人才,智能感知与计算工信部重点实验室副主任,西北工业大学计算与艺术交叉研究中心主任,陕西省高校青年创新团队负责人。2009年在日本庆应大学获博士学位,2009-2011年在法国国立电信学院进行博士后研究。主要从事智能物联网、普适与泛在计算、人机物融合群智计算等方面的研究。在IEEE/ACM汇刊等国内外重要期刊和会议上发表论文150余篇,且面向智慧城市、智能制造、公共安全等国家重大需求开展领域应用和技术推广。曾获得教育部自然科学一等奖、陕西省自然科学一等奖以及IEEE UIC'17等国际会议“最佳论文奖”。担任IEEE Transactions on Human-Machine Systems、IEEE Communications Magazine、ACM IMWUT等国际权威期刊编委。CCF西安分部主席,CCF杰出会员,IEEE高级会员,爱思唯尔中国高被引学者。
参与方式:文章三连并且评论“人生苦短,拒绝内卷”,24小时后程序自动抽取4位小伙伴送出技术图书《通用人工智能:初心与未来》!




