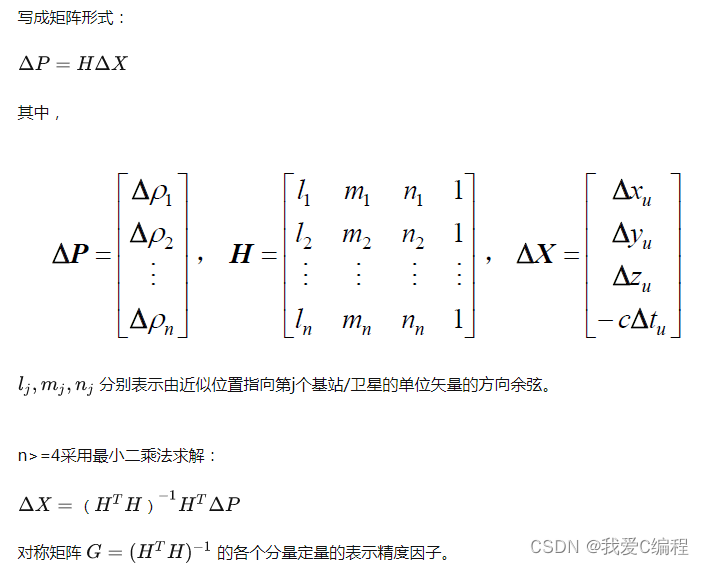
1.算法描述 全球四大导航卫星系统包括:美国GPS、俄罗斯GLONASS(格洛纳斯)、中国北斗和欧洲Galileo(伽利略)卫星系统。四大卫星定位系统靠卫星自身可以达到米级的定位,要实现更精准的定位就需要地面基准站的辅助了。通过购买千寻位置、中国移动、六分科技等企业的RTK(Real-Time Kinematic 实时动态载波相位差分)账号或者CORS账号(Continuously Operating Reference Stations 连续运行定位服务参考站)可以实现厘米级别的定位。
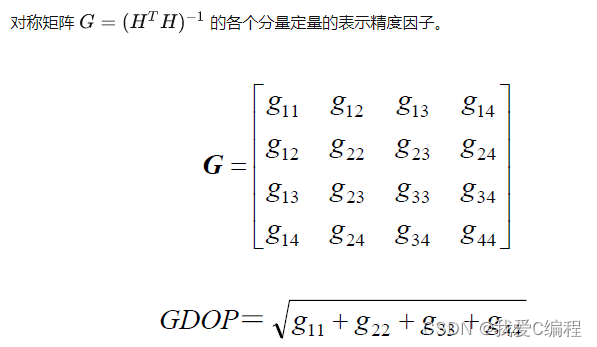
GDOP((Geometric Dilution of Precision)几何精度因子,是衡量GNSS(Global Navigation Satellite System)全球导航卫星系统定位精度的指标。其分量包括:
PDOP( position dilution of precision ) 三维精度因子;
HDOP(horizontal dilution of precision) 水平精度因子;
VDOP(vertical dilution of precision)垂直几何精度因子;
TDOP(time dilution of precision)时间精度因子;
对于经常要使用RTK的测量人来说,掌握一些使用过程中经常用到的专业术语是很有必要的,比如GDOP、差分测量、静态定位等等,了解这些有助于更加熟练地使用RTK,从而高效地进行测量作业。GDOP(Geometric dilution of precision)几何精度因子:包括经度,纬度,高程和时间等因子,称为几何精度因子。

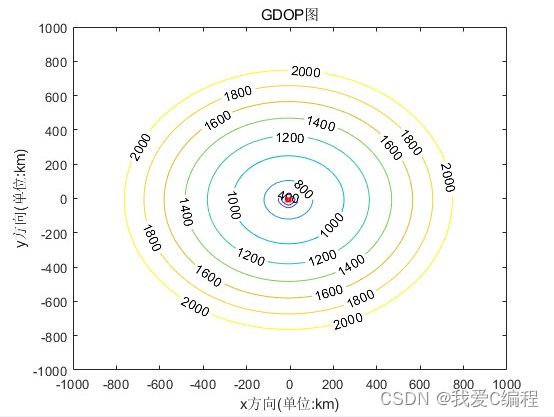
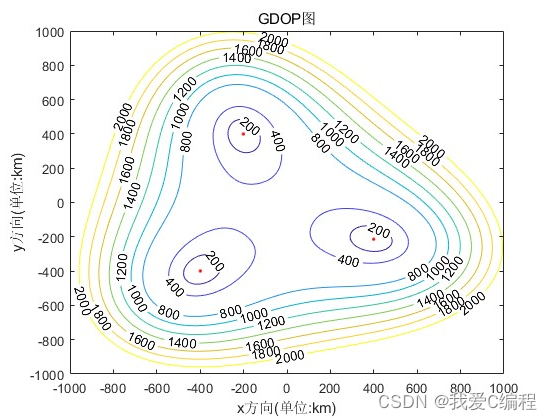
 2.仿真效果预览
matlab2022a仿真结果如下:
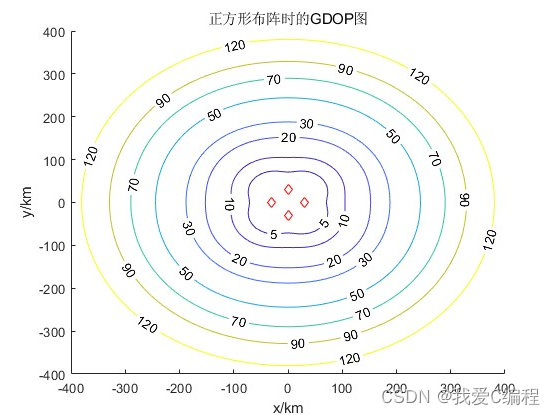
2.仿真效果预览
matlab2022a仿真结果如下:
 3.MATLAB核心程序
3.MATLAB核心程序
clc;
clear;
close all;
warning off;
addpath(genpath(pwd));
%%(1)直线形布站
s(:,:,1) = [-90 -60 -30 0 30 60 90;...
0 0 0 0 0 0 0]*1e3;
%%(2)楔形布站
s(:,:,2) = [-45 -30 -15 0 15 30 45;...
-90*cos(pi/6) -60*cos(pi/6) -30*cos(pi/6) 0 -30*cos(pi/6) -60*cos(pi/6) -90*cos(pi/6)]*1e3;
%%(3)工字形布站
s(:,:,3) = [-30 0 30 0 -30 0 30;...
30 30 30 0 -30 -30 -30]*1e3;
%%(4)梯形布站
s(:,:,4) = [-30 0 30 -45 -15 15 45;...
0 0 0 -30*cos(pi/6) -30*cos(pi/6) -30*cos(pi/6) -30*cos(pi/6)]*1e3;
%%(5)圆形布站
r = 3.45714e4;
theta0=2*pi/7;
for i = 1:7%七部
s(:,i,5)=[r*cos(theta0*i);r*sin(theta0*i)];
end
%%(6)十字形布站
s(:,:,6) = [-60 -30 0 30 60 0 0;...
0 0 0 0 0 30 -30]*1e3;
index_s = 2;%步战形式编号
sd_angle = 2*pi/180; %方位角标准差
sd_zhanzhi = 10; %站址标准差
Qa = eye(size(s,2))*(sd_angle)^2; %方位角方差
% Qb = eye(size(s,2)*2)*sd_zhanzhi^2;
x = -400e3:10e3:400e3; y = -400e3:10e3:400e3;
for i = 1:81
for j=1:81
u = [x(i);y(j)];
[rms1(j,i), ~] = crlb_AOA(u,s(:,:,index_s),Qa);%仅有测角误差时的CRLB的绝对值
rms2(j,i) = rms1(j,i)/norm(u);
% [rms1(j,i), ~] = crlb_AOA(u,s(:,:,index_s),Qa,Qb);
% rms2(j,i) = rms1(j,i)/norm(u);
% diff_rms(j,i) = crlb_AOA1(u,s(:,:,1),Qa,Qb);
end
end
figure(1)
switch index_s
case 1
title('直线形布阵时的GDOP图');
Q=[5 10 20 30 50 70 90 120 300]; %等位线标识数值
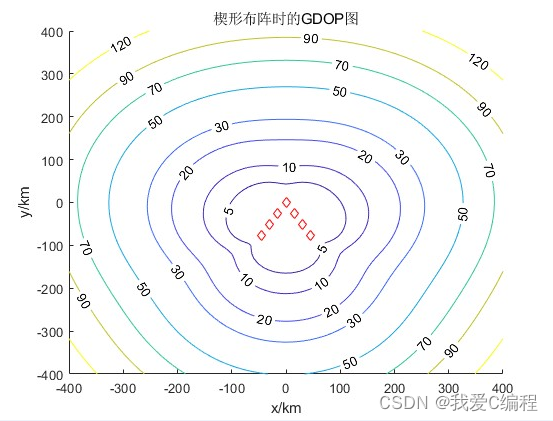
case 2
title('楔形布阵时的GDOP图');
Q=[5 10 20 30 50 70 90 120 300];
case 3
title('工字形布阵时的GDOP图');
Q=[5 10 20 30 50 70 90 120 300];
case 4
title('梯形布阵时的GDOP图');
Q=[5 10 20 30 50 70 90 120 300];
case 5
% title('不存在平台导航误差且圆形布阵时的GDOP图');
% Q=[1 3 5 7 9 12 15 17];
title('圆形布阵时的GDOP图');
Q=[5 10 20 30 50 70 90 120 300];
case 6
title('十字形布阵时的GDOP图');
Q=[5 10 20 30 50 70 90 120 300];
end
hold on;
[c,handle]=contour(x*1e-3,y*1e-3,rms1*1e-3,Q);
clabel(c,handle);hold on; %等位线标识
plot(s(1,:,index_s)*1e-3,s(2,:,index_s)*1e-3,'rd')
xlabel('x/km'); ylabel('y/km');
figure(2)
switch index_s
case 1
title('直线形布阵时的GDOP相对值图');
Q=[0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.12 0.15 0.17 0.2 0.3 0.5];
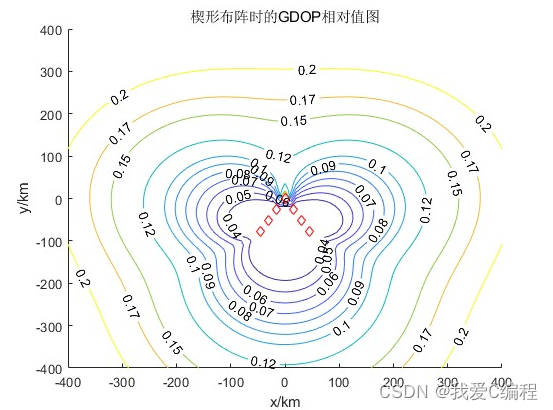
case 2
title('楔形布阵时的GDOP相对值图');
Q=[0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.12 0.15 0.17 0.2 0.3 0.5];
case 3
title('工字形布阵时的GDOP相对值图');
Q=[0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.12 0.15 0.17 0.2 0.3 0.5];
case 4
title('梯形布阵时的GDOP相对值图');
Q=[0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.12 0.15 0.17 0.2 0.3 0.5];
case 5
% title('不存在平台导航误差且圆形布阵时的GDOP相对值图');
% Q=[0.005 0.01 0.018 0.025 0.045];
title('圆形布阵时的GDOP相对值图');
Q=[0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.12 0.15 0.17 0.2 0.3 0.5];
case 6
title('十字形布阵时的GDOP相对值图');
Q=[0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.12 0.15 0.17 0.2 0.3 0.5];
end
hold on;[c,handle]=contour(x*1e-3,y*1e-3,rms2,Q);
clabel(c,handle);hold on;
plot(s(1,:,index_s)*1e-3,s(2,:,index_s)*1e-3,'rd')
xlabel('x/km'); ylabel('y/km');
A74









