1 简介
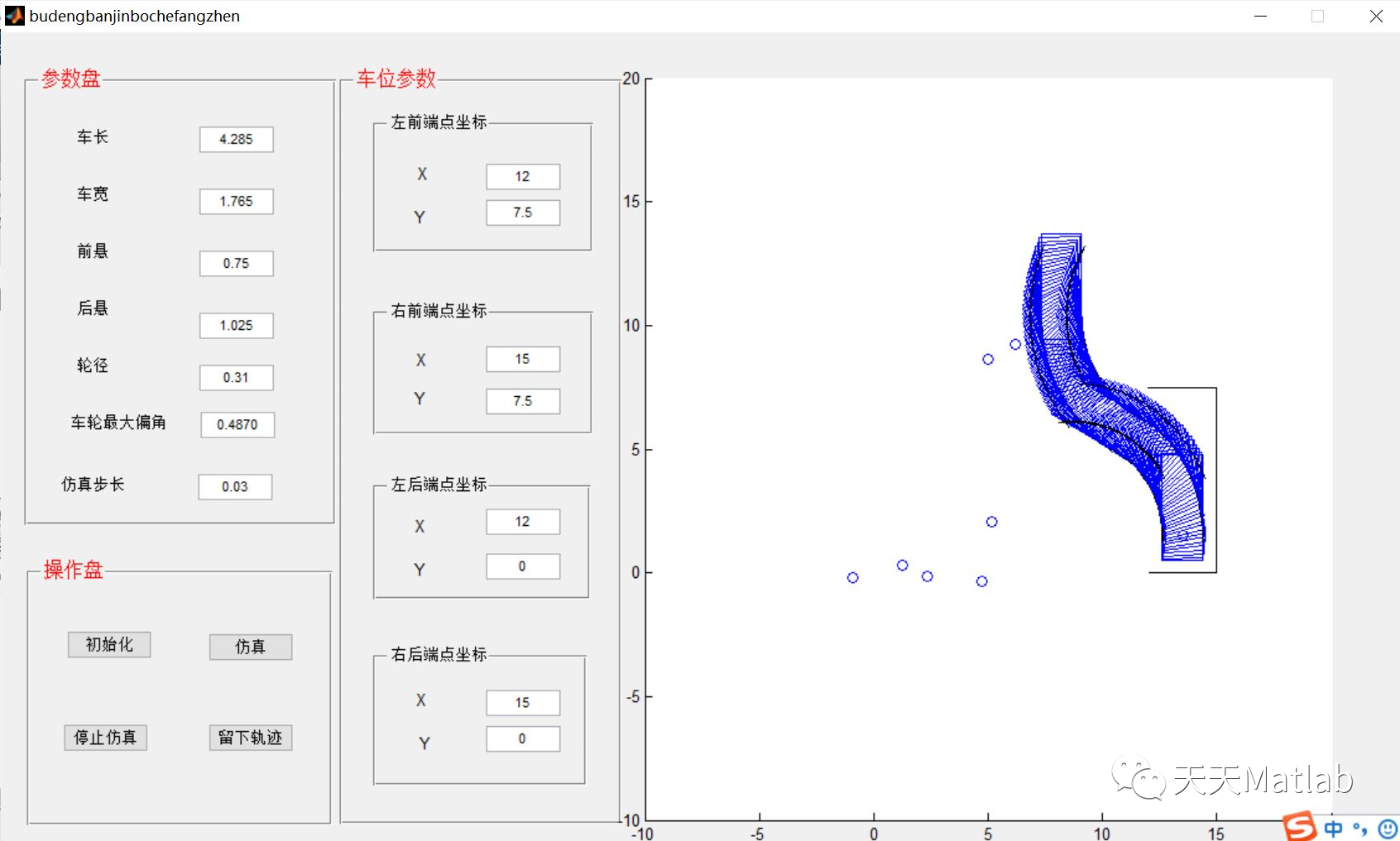
自动泊车路径的规划属于从低约束到高约束的问题,也属于非完整约束问题.一般的路径规划总是不尽如人意,对泊车条件要求高.根据一般问题的解决从高约束到低约束的过程,在最短路径的基础上,先确定高约束阶段泊车车辆进入泊车位的路径,计算出停车位长度与直线斜率的拟合公式,得到直线的斜率,再改变泊车半径,确定低约束段的泊车路径.利用车辆运动学模型,对车辆位置和姿态的分析,碰撞点到车辆的距离计算,证明了路径规划的可行性,生成的泊车轨迹比较符合泊车实际情况.
2 完整代码
function varargout = budengbanjinbochefangzhen(varargin)
% BUDENGBANJINBOCHEFANGZHEN M-file for budengbanjinbochefangzhen.fig
% BUDENGBANJINBOCHEFANGZHEN, by itself, creates a new BUDENGBANJINBOCHEFANGZHEN or raises the existing
% singleton*.
%
% H = BUDENGBANJINBOCHEFANGZHEN returns the handle to a new BUDENGBANJINBOCHEFANGZHEN or the handle to
% the existing singleton*.
%
% BUDENGBANJINBOCHEFANGZHEN('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in BUDENGBANJINBOCHEFANGZHEN.M with the given input arguments.
%
% BUDENGBANJINBOCHEFANGZHEN('Property','Value',...) creates a new BUDENGBANJINBOCHEFANGZHEN or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before budengbanjinbochefangzhen_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to budengbanjinbochefangzhen_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help budengbanjinbochefangzhen
% Last Modified by GUIDE v2.5 14-Sep-2010 11:41:20
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @budengbanjinbochefangzhen_OpeningFcn, ...
'gui_OutputFcn', @budengbanjinbochefangzhen_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before budengbanjinbochefangzhen is made visible.
function budengbanjinbochefangzhen_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to budengbanjinbochefangzhen (see VARARGIN)
% Choose default command line output for budengbanjinbochefangzhen
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes budengbanjinbochefangzhen wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = budengbanjinbochefangzhen_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
global long;% 使这个变量变成全局变量
global width;% 使这个变量变成全局变量
global qianxuan;% 使这个变量变成全局变量
global houxuan;% 使这个变量变成全局变量
global lunjin;% 使这个变量变成全局变量
global fai;% 使这个变量变成全局变量
global x6;% 使这个变量变成全局变量
global y6;% 使这个变量变成全局变量
global x7;% 使这个变量变成全局变量
global y7;% 使这个变量变成全局变量
global x8;% 使这个变量变成全局变量
global y8;% 使这个变量变成全局变量
global x9;% 使这个变量变成全局变量
global y9;% 使这个变量变成全局变量
global ds;% 使这个变量变成全局变量
global r;% 使这个变量变成全局变量
global xd;% 使这个变量变成全局变量
global yd;% 使这个变量变成全局变量
axis([-10,20,-10,20]);
axis manual;
hold on;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%参数集,这里存放的为车辆与车位已经仿真所需的主要参数
%手动输入参数集
long=str2double(get(handles.edit1,'string'));
width=str2double(get(handles.edit2,'string'));
qianxuan=str2double(get(handles.edit3,'string'));
houxuan=str2double(get(handles.edit4,'string'));
lunjin=str2double(get(handles.edit5,'string'));
fai=-str2double(get(handles.edit6,'string'));
x6=str2double(get(handles.edit8,'string'));
y6=str2double(get(handles.edit9,'string'));
x7=str2double(get(handles.edit10,'string'));
y7=str2double(get(handles.edit11,'string'));
x9=str2double(get(handles.edit12,'string'));
y9=str2double(get(handles.edit13,'string'));
x8=str2double(get(handles.edit14,'string'));
y8=str2double(get(handles.edit15,'string'));
ds=str2double(get(handles.edit7,'string'));
% long=6;%long 为车车长
% width=3;%width 为车宽
% qianxuan=1;%qianxuan 为车前悬长度
% houxuan=1;% houxuan 为车后悬长度
% lunjin=0.3;%lunjin为车轮半径
% fai=-(pi)/5;%fai 为前一段轨迹的车前轮偏角
%
%
% x6=11;
% y6=15;
% x7=18;
% y7=15;
% x8=18;
% y8=0;
% x9=11;
% y9=0;
%
% ds=0.3; %仿真步长
%自动生成参数集
r=(long-qianxuan-houxuan)/abs(tan(fai));% 车辆的后轴中心点转弯半径
%theta0=(pi)/2;%theta0为起始点车身偏角
xd=(x8+x9)/2;%终点坐标
yd=(y8+y9)/2+1.5;
h0=plot(xd,yd,'bo');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%画车位
%(x6,y6)、(x7,y7)、(x8,y8)、(x9,y9)分别为车位的四个端点坐标
%根据车位的四个端点画出车位的轮廓
l0=plot([x6,x7],[y6,y7],'-k');
l1=plot([x7,x8],[y7,y8],'-k');
l2=plot([x8,x9],[y8,y9],'-k');
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
global long;% 使这个变量变成全局变量
global width;% 使这个变量变成全局变量
global qianxuan;% 使这个变量变成全局变量
global houxuan;% 使这个变量变成全局变量
global lunjin;% 使这个变量变成全局变量
global fai;% 使这个变量变成全局变量
global x6;% 使这个变量变成全局变量
global y6;% 使这个变量变成全局变量
global x7;% 使这个变量变成全局变量
global y7;% 使这个变量变成全局变量
global x8;% 使这个变量变成全局变量
global y8;% 使这个变量变成全局变量
global x9;% 使这个变量变成全局变量
global y9;% 使这个变量变成全局变量
global ds;% 使这个变量变成全局变量
global r;% 使这个变量变成全局变量
global xd;% 使这个变量变成全局变量
global yd;% 使这个变量变成全局变量
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%画轨迹,求t1,t2
[x0,y0] = ginput(1);%获取起点坐标
plot(x0,y0,'bo');
%原方法的两个参数
rr1=(((xd-x0)^2+(yd-y0)^2)/(2*(xd-x0)))-r;
if(x0+rr1-xd+r>=0)
t3=asin((y0-yd)/(rr1+r));
else
t3=asin((yd-y0)/(rr1+r))+(pi);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%原方法的轨迹
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(rr1<r)
fprintf('轨迹无解,不等半径泊车方法无法泊车\n');
return;
end
x1=x0+rr1;
y1=y0;
fai1=-atan((long-qianxuan-houxuan)/rr1);
%第一阶段轨迹
for i=(pi):(ds*r/rr1):(pi+t3);
x=x1+rr1*cos(i);
y=y1+rr1*sin(i);
theta=i-(pi/2);
jiao1=atan((width/2)/(long-houxuan));
jiao2=jiao1;
jiao3=atan((width/2)/houxuan);
jiao4=jiao3;
jiao1=theta-jiao1;
jiao2=theta+jiao2;
jiao3=theta+pi-jiao3;
jiao4=theta+pi+jiao4;
r1=sqrt((width/2)^2+(long-houxuan)^2);%以下描述车身的四个端点
r2=sqrt((width/2)^2+houxuan^2);
youqianx=x+r1*cos(jiao1);
youqiany=y+r1*sin(jiao1);
zuoqianx=x+r1*cos(jiao2);
zuoqiany=y+r1*sin(jiao2);
zuohoux=x+r2*cos(jiao3);
zuohouy=y+r2*sin(jiao3);
youhoux=x+r2*cos(jiao4);
youhouy=y+r2*sin(jiao4);
h17=plot([youqianx,zuoqianx],[youqiany,zuoqiany],'-b');
h18=plot([zuoqianx,zuohoux],[zuoqiany,zuohouy],'-b');
h19=plot([zuohoux,youhoux],[zuohouy,youhouy],'-b');
h20=plot([youhoux,youqianx],[youhouy,youqiany],'-b');
jiao5=atan((width/2)/(long-qianxuan-houxuan));%以下描写车的四个轮子
jiao6=jiao5;
jiao5=theta-jiao5;
jiao6=theta+jiao6;
jiao7=theta+(pi/2);
jiao8=theta-(pi/2);
jiao9=theta+fai1;
jiaoa=theta;
r3=sqrt((width/2)^2+(long-qianxuan-houxuan)^2);
r4=width/2;
yqianlunzx=x+r3*cos(jiao5);
yqianlunzy=y+r3*sin(jiao5);
yqianlunqx=yqianlunzx+lunjin*cos(jiao9);
yqianlunqy=yqianlunzy+lunjin*sin(jiao9);
yqianlunhx=yqianlunzx-lunjin*cos(jiao9);
yqianlunhy=yqianlunzy-lunjin*sin(jiao9);
h21=plot([yqianlunqx,yqianlunhx],[yqianlunqy,yqianlunhy],'-k');
zqianlunzx=x+r3*cos(jiao6);
zqianlunzy=y+r3*sin(jiao6);
zqianlunqx=zqianlunzx+lunjin*cos(jiao9);
zqianlunqy=zqianlunzy+lunjin*sin(jiao9);
zqianlunhx=zqianlunzx-lunjin*cos(jiao9);
zqianlunhy=zqianlunzy-lunjin*sin(jiao9);
h22=plot([zqianlunqx,zqianlunhx],[zqianlunqy,zqianlunhy],'-k');
zhoulunzx=x+r4*cos(jiao7);
zhoulunzy=y+r4*sin(jiao7);
zhoulunqx=zhoulunzx+lunjin*cos(jiaoa);
zhoulunqy=zhoulunzy+lunjin*sin(jiaoa);
zhoulunhx=zhoulunzx-lunjin*cos(jiaoa);
zhoulunhy=zhoulunzy-lunjin*sin(jiaoa);
h23=plot([zhoulunqx,zhoulunhx],[zhoulunqy,zhoulunhy],'-k');
yhoulunzx=x+r4*cos(jiao8);
yhoulunzy=y+r4*sin(jiao8);
yhoulunqx=yhoulunzx+lunjin*cos(jiaoa);
yhoulunqy=yhoulunzy+lunjin*sin(jiaoa);
yhoulunhx=yhoulunzx-lunjin*cos(jiaoa);
yhoulunhy=yhoulunzy-lunjin*sin(jiaoa);
h24=plot([yhoulunqx,yhoulunhx],[yhoulunqy,yhoulunhy],'-k');
%在此添加判决函数,判断是否第一阶段会碰到障碍物
if(yhoulunzx-x6>=0 & yhoulunzy-y6>=0)
fprintf('第一阶段碰到障碍物,不等半径泊车方法无法泊车\n');
delete(h17);
delete(h18);
delete(h19);
delete(h20);
delete(h21);
delete(h22);
delete(h23);
delete(h24);
return;
end
pause(0.01);
delete(h17);
delete(h18);
delete(h19);
delete(h20);
delete(h21);
delete(h22);
delete(h23);
delete(h24);
end
%第二阶段轨迹
x2=xd-r;
y2=yd;
fai2=-fai;
for i=t3:(-ds):0
x=x2+r*cos(i);
y=y2+r*sin(i);
theta=i+(pi/2);
jiao1=atan((width/2)/(long-houxuan));
jiao2=jiao1;
jiao3=atan((width/2)/houxuan);
jiao4=jiao3;
jiao1=theta-jiao1;
jiao2=theta+jiao2;
jiao3=theta+pi-jiao3;
jiao4=theta+pi+jiao4;
r1=sqrt((width/2)^2+(long-houxuan)^2);%以下描述车身的四个端点
r2=sqrt((width/2)^2+houxuan^2);
youqianx=x+r1*cos(jiao1);
youqiany=y+r1*sin(jiao1);
zuoqianx=x+r1*cos(jiao2);
zuoqiany=y+r1*sin(jiao2);
%在此添加判决函数,判断是否第二阶段会碰到障碍物
if(youqianx-x6>=0 & youqiany-y6>=0)
fprintf('第二阶段碰到障碍物,不等半径泊车方法无法泊车\n');
return;
end
zuohoux=x+r2*cos(jiao3);
zuohouy=y+r2*sin(jiao3);
youhoux=x+r2*cos(jiao4);
youhouy=y+r2*sin(jiao4);
h25=plot([youqianx,zuoqianx],[youqiany,zuoqiany],'-b');
h26=plot([zuoqianx,zuohoux],[zuoqiany,zuohouy],'-b');
h27=plot([zuohoux,youhoux],[zuohouy,youhouy],'-b');
h28=plot([youhoux,youqianx],[youhouy,youqiany],'-b');
jiao5=atan((width/2)/(long-qianxuan-houxuan));%以下描写车的四个轮子
jiao6=jiao5;
jiao5=theta-jiao5;
jiao6=theta+jiao6;
jiao7=theta+(pi/2);
jiao8=theta-(pi/2);
jiao9=theta+fai2;
jiaoa=theta;
r3=sqrt((width/2)^2+(long-qianxuan-houxuan)^2);
r4=width/2;
yqianlunzx=x+r3*cos(jiao5);
yqianlunzy=y+r3*sin(jiao5);
yqianlunqx=yqianlunzx+lunjin*cos(jiao9);
yqianlunqy=yqianlunzy+lunjin*sin(jiao9);
yqianlunhx=yqianlunzx-lunjin*cos(jiao9);
yqianlunhy=yqianlunzy-lunjin*sin(jiao9);
h29=plot([yqianlunqx,yqianlunhx],[yqianlunqy,yqianlunhy],'-k');
zqianlunzx=x+r3*cos(jiao6);
zqianlunzy=y+r3*sin(jiao6);
zqianlunqx=zqianlunzx+lunjin*cos(jiao9);
zqianlunqy=zqianlunzy+lunjin*sin(jiao9);
zqianlunhx=zqianlunzx-lunjin*cos(jiao9);
zqianlunhy=zqianlunzy-lunjin*sin(jiao9);
h30=plot([zqianlunqx,zqianlunhx],[zqianlunqy,zqianlunhy],'-k');
zhoulunzx=x+r4*cos(jiao7);
zhoulunzy=y+r4*sin(jiao7);
zhoulunqx=zhoulunzx+lunjin*cos(jiaoa);
zhoulunqy=zhoulunzy+lunjin*sin(jiaoa);
zhoulunhx=zhoulunzx-lunjin*cos(jiaoa);
zhoulunhy=zhoulunzy-lunjin*sin(jiaoa);
h31=plot([zhoulunqx,zhoulunhx],[zhoulunqy,zhoulunhy],'-k');
yhoulunzx=x+r4*cos(jiao8);
yhoulunzy=y+r4*sin(jiao8);
yhoulunqx=yhoulunzx+lunjin*cos(jiaoa);
yhoulunqy=yhoulunzy+lunjin*sin(jiaoa);
yhoulunhx=yhoulunzx-lunjin*cos(jiaoa);
yhoulunhy=yhoulunzy-lunjin*sin(jiaoa);
h32=plot([yhoulunqx,yhoulunhx],[yhoulunqy,yhoulunhy],'-k');
pause(0.01);
delete(h25);
delete(h26);
delete(h27);
delete(h28);
delete(h29);
delete(h30);
delete(h31);
delete(h32);
end
r1=sqrt((width/2)^2+(long-houxuan)^2);%以下描述车身的四个端点
r2=sqrt((width/2)^2+houxuan^2);
youqianx=x+r1*cos(jiao1);
youqiany=y+r1*sin(jiao1);
zuoqianx=x+r1*cos(jiao2);
zuoqiany=y+r1*sin(jiao2);
%在此添加判决函数,判断是否第二阶段会碰到障碍物
if(youqianx-x6>=0 & youqiany-y6>=0)
fprintf('第二阶段碰到障碍物,不等半径泊车方法无法泊车\n');
return;
end
zuohoux=x+r2*cos(jiao3);
zuohouy=y+r2*sin(jiao3);
youhoux=x+r2*cos(jiao4);
youhouy=y+r2*sin(jiao4);
h25=plot([youqianx,zuoqianx],[youqiany,zuoqiany],'-b');
h26=plot([zuoqianx,zuohoux],[zuoqiany,zuohouy],'-b');
h27=plot([zuohoux,youhoux],[zuohouy,youhouy],'-b');
h28=plot([youhoux,youqianx],[youhouy,youqiany],'-b');
jiao5=atan((width/2)/(long-qianxuan-houxuan));%以下描写车的四个轮子
jiao6=jiao5;
jiao5=theta-jiao5;
jiao6=theta+jiao6;
jiao7=theta+(pi/2);
jiao8=theta-(pi/2);
jiao9=theta+fai2;
jiaoa=theta;
r3=sqrt((width/2)^2+(long-qianxuan-houxuan)^2);
r4=width/2;
yqianlunzx=x+r3*cos(jiao5);
yqianlunzy=y+r3*sin(jiao5);
yqianlunqx=yqianlunzx+lunjin*cos(jiao9);
yqianlunqy=yqianlunzy+lunjin*sin(jiao9);
yqianlunhx=yqianlunzx-lunjin*cos(jiao9);
yqianlunhy=yqianlunzy-lunjin*sin(jiao9);
h29=plot([yqianlunqx,yqianlunhx],[yqianlunqy,yqianlunhy],'-k');
zqianlunzx=x+r3*cos(jiao6);
zqianlunzy=y+r3*sin(jiao6);
zqianlunqx=zqianlunzx+lunjin*cos(jiao9);
zqianlunqy=zqianlunzy+lunjin*sin(jiao9);
zqianlunhx=zqianlunzx-lunjin*cos(jiao9);
zqianlunhy=zqianlunzy-lunjin*sin(jiao9);
h30=plot([zqianlunqx,zqianlunhx],[zqianlunqy,zqianlunhy],'-k');
zhoulunzx=x+r4*cos(jiao7);
zhoulunzy=y+r4*sin(jiao7);
zhoulunqx=zhoulunzx+lunjin*cos(jiaoa);
zhoulunqy=zhoulunzy+lunjin*sin(jiaoa);
zhoulunhx=zhoulunzx-lunjin*cos(jiaoa);
zhoulunhy=zhoulunzy-lunjin*sin(jiaoa);
h31=plot([zhoulunqx,zhoulunhx],[zhoulunqy,zhoulunhy],'-k');
yhoulunzx=x+r4*cos(jiao8);
yhoulunzy=y+r4*sin(jiao8);
yhoulunqx=yhoulunzx+lunjin*cos(jiaoa);
yhoulunqy=yhoulunzy+lunjin*sin(jiaoa);
yhoulunhx=yhoulunzx-lunjin*cos(jiaoa);
yhoulunhy=yhoulunzy-lunjin*sin(jiaoa);
h32=plot([yhoulunqx,yhoulunhx],[yhoulunqy,yhoulunhy],'-k');
pause(0.01);
s1=t3*rr1;
s2=t3*r;
fprintf('s1=%f,s2=%f\n',s1,s2);
% --- Executes on button press in pushbutton3.
function pushbutton3_Callback(hObject, eventdata, handles)
cla reset;
clear all;
% --- Executes on button press in pushbutton4.
function pushbutton4_Callback(hObject, eventdata, handles)
global long;% 使这个变量变成全局变量
global width;% 使这个变量变成全局变量
global qianxuan;% 使这个变量变成全局变量
global houxuan;% 使这个变量变成全局变量
global lunjin;% 使这个变量变成全局变量
global fai;% 使这个变量变成全局变量
global x6;% 使这个变量变成全局变量
global y6;% 使这个变量变成全局变量
global x7;% 使这个变量变成全局变量
global y7;% 使这个变量变成全局变量
global x8;% 使这个变量变成全局变量
global y8;% 使这个变量变成全局变量
global x9;% 使这个变量变成全局变量
global y9;% 使这个变量变成全局变量
global ds;% 使这个变量变成全局变量
global r;% 使这个变量变成全局变量
global xd;% 使这个变量变成全局变量
global yd;% 使这个变量变成全局变量
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%画轨迹,求t1,t2
[x0,y0] = ginput(1);%获取起点坐标
plot(x0,y0,'bo');
%原方法的两个参数
rr1=(((xd-x0)^2+(yd-y0)^2)/(2*(xd-x0)))-r;
if(x0+rr1-xd+r>=0)
t3=asin((y0-yd)/(rr1+r));
else
t3=asin((yd-y0)/(rr1+r))+(pi);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%原方法的轨迹
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if(rr1-r<0)
fprintf('轨迹无解,不等半径泊车方法无法泊车\n');
return;
end
x1=x0+rr1;
y1=y0;
fai1=fai;
%第一阶段轨迹
for i=(pi):(ds*r/rr1):(pi+t3);
x=x1+rr1*cos(i);
y=y1+rr1*sin(i);
theta=i-(pi/2);
jiao1=atan((width/2)/(long-houxuan));
jiao2=jiao1;
jiao3=atan((width/2)/houxuan);
jiao4=jiao3;
jiao1=theta-jiao1;
jiao2=theta+jiao2;
jiao3=theta+pi-jiao3;
jiao4=theta+pi+jiao4;
r1=sqrt((width/2)^2+(long-houxuan)^2);%以下描述车身的四个端点
r2=sqrt((width/2)^2+houxuan^2);
youqianx=x+r1*cos(jiao1);
youqiany=y+r1*sin(jiao1);
zuoqianx=x+r1*cos(jiao2);
zuoqiany=y+r1*sin(jiao2);
zuohoux=x+r2*cos(jiao3);
zuohouy=y+r2*sin(jiao3);
youhoux=x+r2*cos(jiao4);
youhouy=y+r2*sin(jiao4);
h17=plot([youqianx,zuoqianx],[youqiany,zuoqiany],'-b');
h18=plot([zuoqianx,zuohoux],[zuoqiany,zuohouy],'-b');
h19=plot([zuohoux,youhoux],[zuohouy,youhouy],'-b');
h20=plot([youhoux,youqianx],[youhouy,youqiany],'-b');
jiao5=atan((width/2)/(long-qianxuan-houxuan));%以下描写车的四个轮子
jiao6=jiao5;
jiao5=theta-jiao5;
jiao6=theta+jiao6;
jiao7=theta+(pi/2);
jiao8=theta-(pi/2);
jiao9=theta+fai1;
jiaoa=theta;
r3=sqrt((width/2)^2+(long-qianxuan-houxuan)^2);
r4=width/2;
yqianlunzx=x+r3*cos(jiao5);
yqianlunzy=y+r3*sin(jiao5);
yqianlunqx=yqianlunzx+lunjin*cos(jiao9);
yqianlunqy=yqianlunzy+lunjin*sin(jiao9);
yqianlunhx=yqianlunzx-lunjin*cos(jiao9);
yqianlunhy=yqianlunzy-lunjin*sin(jiao9);
h21=plot([yqianlunqx,yqianlunhx],[yqianlunqy,yqianlunhy],'-k');
zqianlunzx=x+r3*cos(jiao6);
zqianlunzy=y+r3*sin(jiao6);
zqianlunqx=zqianlunzx+lunjin*cos(jiao9);
zqianlunqy=zqianlunzy+lunjin*sin(jiao9);
zqianlunhx=zqianlunzx-lunjin*cos(jiao9);
zqianlunhy=zqianlunzy-lunjin*sin(jiao9);
h22=plot([zqianlunqx,zqianlunhx],[zqianlunqy,zqianlunhy],'-k');
zhoulunzx=x+r4*cos(jiao7);
zhoulunzy=y+r4*sin(jiao7);
zhoulunqx=zhoulunzx+lunjin*cos(jiaoa);
zhoulunqy=zhoulunzy+lunjin*sin(jiaoa);
zhoulunhx=zhoulunzx-lunjin*cos(jiaoa);
zhoulunhy=zhoulunzy-lunjin*sin(jiaoa);
h23=plot([zhoulunqx,zhoulunhx],[zhoulunqy,zhoulunhy],'-k');
yhoulunzx=x+r4*cos(jiao8);
yhoulunzy=y+r4*sin(jiao8);
yhoulunqx=yhoulunzx+lunjin*cos(jiaoa);
yhoulunqy=yhoulunzy+lunjin*sin(jiaoa);
yhoulunhx=yhoulunzx-lunjin*cos(jiaoa);
yhoulunhy=yhoulunzy-lunjin*sin(jiaoa);
h24=plot([yhoulunqx,yhoulunhx],[yhoulunqy,yhoulunhy],'-k');
%在此添加判决函数,判断是否第一阶段会碰到障碍物
if(yhoulunzx-x6>=0 & yhoulunzy-y6>=0)
fprintf('第一阶段碰到障碍物,不等半径泊车方法无法泊车\n');
delete(h17);
delete(h18);
delete(h19);
delete(h20);
delete(h21);
delete(h22);
delete(h23);
delete(h24);
return;
end
pause(0.01);
end
%第二阶段轨迹
x2=xd-r;
y2=yd;
fai2=-fai;
for i=t3:(-ds):0
x=x2+r*cos(i);
y=y2+r*sin(i);
theta=i+(pi/2);
jiao1=atan((width/2)/(long-houxuan));
jiao2=jiao1;
jiao3=atan((width/2)/houxuan);
jiao4=jiao3;
jiao1=theta-jiao1;
jiao2=theta+jiao2;
jiao3=theta+pi-jiao3;
jiao4=theta+pi+jiao4;
r1=sqrt((width/2)^2+(long-houxuan)^2);%以下描述车身的四个端点
r2=sqrt((width/2)^2+houxuan^2);
youqianx=x+r1*cos(jiao1);
youqiany=y+r1*sin(jiao1);
zuoqianx=x+r1*cos(jiao2);
zuoqiany=y+r1*sin(jiao2);
%在此添加判决函数,判断是否第二阶段会碰到障碍物
if(youqianx-x6>=0 & youqiany-y6>=0)
fprintf('第二阶段碰到障碍物,不等半径泊车方法无法泊车\n');
return;
end
zuohoux=x+r2*cos(jiao3);
zuohouy=y+r2*sin(jiao3);
youhoux=x+r2*cos(jiao4);
youhouy=y+r2*sin(jiao4);
h25=plot([youqianx,zuoqianx],[youqiany,zuoqiany],'-b');
h26=plot([zuoqianx,zuohoux],[zuoqiany,zuohouy],'-b');
h27=plot([zuohoux,youhoux],[zuohouy,youhouy],'-b');
h28=plot([youhoux,youqianx],[youhouy,youqiany],'-b');
jiao5=atan((width/2)/(long-qianxuan-houxuan));%以下描写车的四个轮子
jiao6=jiao5;
jiao5=theta-jiao5;
jiao6=theta+jiao6;
jiao7=theta+(pi/2);
jiao8=theta-(pi/2);
jiao9=theta+fai2;
jiaoa=theta;
r3=sqrt((width/2)^2+(long-qianxuan-houxuan)^2);
r4=width/2;
yqianlunzx=x+r3*cos(jiao5);
yqianlunzy=y+r3*sin(jiao5);
yqianlunqx=yqianlunzx+lunjin*cos(jiao9);
yqianlunqy=yqianlunzy+lunjin*sin(jiao9);
yqianlunhx=yqianlunzx-lunjin*cos(jiao9);
yqianlunhy=yqianlunzy-lunjin*sin(jiao9);
h29=plot([yqianlunqx,yqianlunhx],[yqianlunqy,yqianlunhy],'-k');
zqianlunzx=x+r3*cos(jiao6);
zqianlunzy=y+r3*sin(jiao6);
zqianlunqx=zqianlunzx+lunjin*cos(jiao9);
zqianlunqy=zqianlunzy+lunjin*sin(jiao9);
zqianlunhx=zqianlunzx-lunjin*cos(jiao9);
zqianlunhy=zqianlunzy-lunjin*sin(jiao9);
h30=plot([zqianlunqx,zqianlunhx],[zqianlunqy,zqianlunhy],'-k');
zhoulunzx=x+r4*cos(jiao7);
zhoulunzy=y+r4*sin(jiao7);
zhoulunqx=zhoulunzx+lunjin*cos(jiaoa);
zhoulunqy=zhoulunzy+lunjin*sin(jiaoa);
zhoulunhx=zhoulunzx-lunjin*cos(jiaoa);
zhoulunhy=zhoulunzy-lunjin*sin(jiaoa);
h31=plot([zhoulunqx,zhoulunhx],[zhoulunqy,zhoulunhy],'-k');
yhoulunzx=x+r4*cos(jiao8);
yhoulunzy=y+r4*sin(jiao8);
yhoulunqx=yhoulunzx+lunjin*cos(jiaoa);
yhoulunqy=yhoulunzy+lunjin*sin(jiaoa);
yhoulunhx=yhoulunzx-lunjin*cos(jiaoa);
yhoulunhy=yhoulunzy-lunjin*sin(jiaoa);
h32=plot([yhoulunqx,yhoulunhx],[yhoulunqy,yhoulunhy],'-k');
pause(0.01);
end
s1=t3*rr1;
s2=t3*r;
fprintf('s1=%f,s2=%f\n',s1,s2);
function edit1_Callback(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit1 as text
% str2double(get(hObject,'String')) returns contents of edit1 as a double
% --- Executes during object creation, after setting all properties.
function edit1_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit2_Callback(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit2 as text
% str2double(get(hObject,'String')) returns contents of edit2 as a double
% --- Executes during object creation, after setting all properties.
function edit2_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit3_Callback(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit3 as text
% str2double(get(hObject,'String')) returns contents of edit3 as a double
% --- Executes during object creation, after setting all properties.
function edit3_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit4_Callback(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit4 as text
% str2double(get(hObject,'String')) returns contents of edit4 as a double
% --- Executes during object creation, after setting all properties.
function edit4_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit5_Callback(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit4 as text
% str2double(get(hObject,'String')) returns contents of edit4 as a double
% --- Executes during object creation, after setting all properties.
function edit5_CreateFcn(hObject, eventdata, handles)
set(hObject,'string','0.31')
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit6_Callback(hObject, eventdata, handles)
% hObject handle to edit6 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit6 as text
% str2double(get(hObject,'String')) returns contents of edit6 as a double
% --- Executes during object creation, after setting all properties.
function edit6_CreateFcn(hObject, eventdata, handles)
set(hObject,'string','0.4870');
% hObject handle to edit6 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit7_Callback(hObject, eventdata, handles)
% hObject handle to edit7 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit7 as text
% str2double(get(hObject,'String')) returns contents of edit7 as a double
% --- Executes during object creation, after setting all properties.
function edit7_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit7 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit14_Callback(hObject, eventdata, handles)
% hObject handle to edit14 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit14 as text
% str2double(get(hObject,'String')) returns contents of edit14 as a double
% --- Executes during object creation, after setting all properties.
function edit14_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit14 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit15_Callback(hObject, eventdata, handles)
% hObject handle to edit15 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit15 as text
% str2double(get(hObject,'String')) returns contents of edit15 as a double
% --- Executes during object creation, after setting all properties.
function edit15_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit15 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit12_Callback(hObject, eventdata, handles)
% hObject handle to edit12 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit12 as text
% str2double(get(hObject,'String')) returns contents of edit12 as a double
% --- Executes during object creation, after setting all properties.
function edit12_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit12 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit13_Callback(hObject, eventdata, handles)
% hObject handle to edit13 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit13 as text
% str2double(get(hObject,'String')) returns contents of edit13 as a double
% --- Executes during object creation, after setting all properties.
function edit13_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit13 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit10_Callback(hObject, eventdata, handles)
% hObject handle to edit10 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit10 as text
% str2double(get(hObject,'String')) returns contents of edit10 as a double
% --- Executes during object creation, after setting all properties.
function edit10_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit10 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit11_Callback(hObject, eventdata, handles)
% hObject handle to edit11 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit11 as text
% str2double(get(hObject,'String')) returns contents of edit11 as a double
% --- Executes during object creation, after setting all properties.
function edit11_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit11 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit8_Callback(hObject, eventdata, handles)
% hObject handle to edit8 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit8 as text
% str2double(get(hObject,'String')) returns contents of edit8 as a double
% --- Executes during object creation, after setting all properties.
function edit8_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit8 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit9_Callback(hObject, eventdata, handles)
% hObject handle to edit9 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit9 as text
% str2double(get(hObject,'String')) returns contents of edit9 as a double
% --- Executes during object creation, after setting all properties.
function edit9_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit9 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on mouse press over axes background.
function axes1_ButtonDownFcn(hObject, eventdata, handles)
% hObject handle to axes1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
3 仿真结果
4 参考文献
[1]王龙, 朱凯. 基于最短路径的变半径泊车路径规划研究[J]. 汽车科技, 2015(6):7.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。










