在B站上看到有讲无人机自动控制方面的视频,感觉不错,分享下:
https://www.bilibili.com/video/BV1aW411E7Qq/?spm_id_from=333.788.videocard.1

--------------------------------------------------
看来这个才知道,有飞控的叫无人机,无飞控的叫航模(远程遥控飞机)。
原来无人机里面的飞控也是用的PID控制算法。
没有飞行控制器的飞机是难以稳定飞行的,因为它的飞行控制是需要人在远程进行操控的。人类在物理世界中驾驶的载人飞机其控制器其实就是驾驶员。
无人机的飞行状态由飞控器件来控制,人类只需要给出基本的指令,如:悬停,向前飞,向后方,向上飞,向下飞,向左飞,向右飞等指令,而具体的对电动机的控制则由飞控器件根据指令来进行操作。
无人机的控制示意图,个人猜测版:
四旋翼无人机大致长相如下:
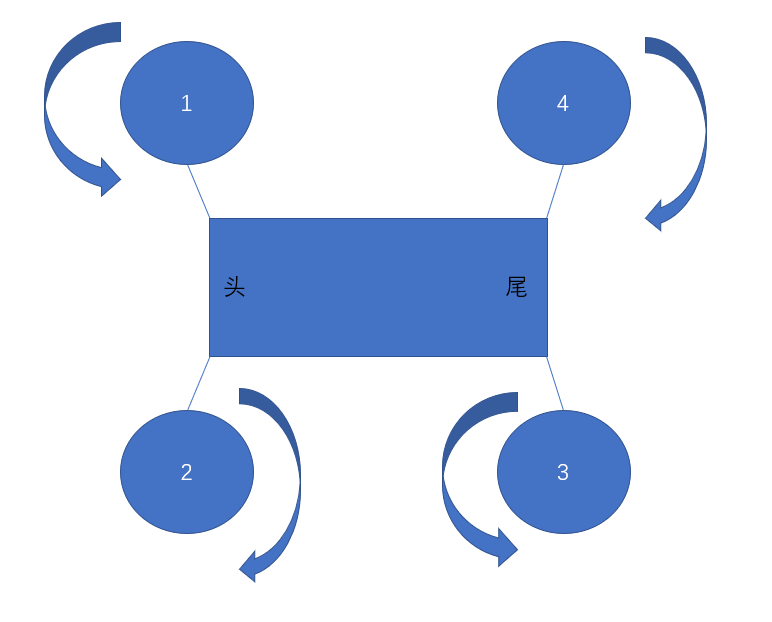
4旋翼无人机共有4个电动机螺旋桨,1号和3号是逆时针选择,2号和4号是顺时针选择。
悬停的时候1,2,3,4号电动机产生的升力之和和无人机的自身重力相当, 1,3号电动机产生的逆时针扭矩 与 2,4号电动机产生的顺时针扭矩相互抵消。
向前运动的时候,1,2号电动机减少旋转转数,3,4号增加旋转的转数,于是头向下倾斜,尾向上倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前向拉力。
向后运动的时候,1,2号电动机增加旋转转数,3,4号减少旋转的转数,于是头向上倾斜,尾向下倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前后拉力。
以头尾的中间线为轴:
向左运动的时候,2,3号电动机减少旋转转数,1,4号增加旋转的转数,于是机身向左下倾斜,尾向右上倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前左拉力。
向右运动的时候,1,4号电动机减少旋转转数,2,3号增加旋转的转数,于是机身向右下倾斜,尾向左上倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前右拉力。
以机身的中心点的垂直线为轴:
向左机身平面左转的时候,2,4号电动机减少旋转转数,1,3号增加旋转的转数,于是机身向左扭矩增加,机身向右扭矩减少。升力与重力相抵消,顺逆时针扭矩不能相互抵消,产生左转的扭矩。
向右机身平面右转的时候,1,3号电动机减少旋转转数,2,4号增加旋转的转数,于是机身向右扭矩增加,机身向左扭矩减少。升力与重力相抵消,顺逆时针扭矩不能相互抵消,产生右转的扭矩。
------------------------------------------










