本文是运用于UAV跟踪的一篇文章, 并且以BACF为基准,首先作者论述了BACF的工作原理,是通过扩大搜索区域,使更多的背景信息去训练滤波器,并且利用剪切矩阵将目标从背景模板中剪切出来,从而提高样本质量以及提高计算速度,但是也因此引入了很多背景噪声,连同目标遮挡或光照变化等一些挑战因素,从而导致检测过程中可能会出现目标定位异常。
针对上述问题。本文提出一种异常抑制相关滤波器,是通过在训练阶段就去抑制异常发生的一种滤波器,通过在BACF目标函数的基础上引入一个表示前后两帧响应图差别的欧几里得范数![]() ,M1和M2表示前后两帧相应图,p和q表示两个响应图中两个峰值在二维空间中的位置差异,
,M1和M2表示前后两帧相应图,p和q表示两个响应图中两个峰值在二维空间中的位置差异,![]() 表示为了使两个峰值彼此重合而进行的移位操作,其函数形式如下:
表示为了使两个峰值彼此重合而进行的移位操作,其函数形式如下:
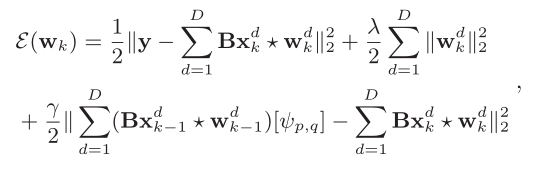
其中M=BX*W,B为剪切矩阵, 是异常惩罚系数,
是异常惩罚系数, 是滤波器惩罚系数, 当异常发生后,证明前后两帧的相似性会很小,从而导致
是滤波器惩罚系数, 当异常发生后,证明前后两帧的相似性会很小,从而导致![]() 会很大,通过将其优化减小就可以起到抑制异常的作用,可视化如下:
会很大,通过将其优化减小就可以起到抑制异常的作用,可视化如下:

ARCF跟踪器的主要工作流程。它学习对象的正样本(绿色样本)和从背景中提取的负样本(红色样本),并且响应图限制被集成到学习过程中,从而可以抑制响应图中的异常。[ψp,q]用于移动生成的响应图,使得前一帧中的峰值位置与当前帧中的峰值位置相同,从而检测到的物体的位置不会收到抑制的影响,
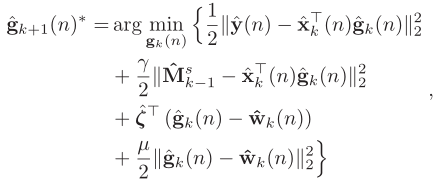
通过ADMM的方式去求解目标函数,^表示在频域中

构造拉格朗日乘数:

求解子问题:

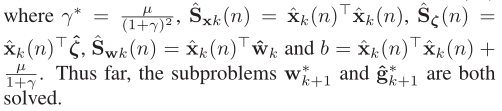
由于上式都凸函数,所以有全局最优解,通过求导等于0可得
求解W:

 这是DFT公式,W可以在空域直接求解。
这是DFT公式,W可以在空域直接求解。
求解g:
由于涉及到![]() ,且在每次ADMM迭代中都需要计算它,所以计算量太大,非常耗时,所以将其再分解为N个子问题,X为的维度(M,N,D)
,且在每次ADMM迭代中都需要计算它,所以计算量太大,非常耗时,所以将其再分解为N个子问题,X为的维度(M,N,D)
求解得

由于涉及到逆运算,再利用谢尔曼·莫里森公式,化简得

参数更新:
拉格朗日乘子:

![]()
模型X更新:

超参数具体的值在论文的试验细节部分都有说明。有的继承了BACF设置










