这里写自定义目录标题
1. 原理
N点标定是在两个二位坐标系中找到N(N>=3)个相同点分别在这两个坐标系中的坐标,并通过这些点坐标计算出这两个坐标系平面之间的单应性矩阵。一般在项目中使用九个点,俗称九点标定。

2. 方案配置

步骤:
- 使用N点标定模块计算两个坐标系平面之间的单应性矩阵
- 查找一个圆特征的圆心在坐标系一下的坐标
- 使用标定转换将上一步计算得到的圆心坐标映射到坐标系二中
- 使用圆心在坐标一下的坐标与坐标系二的原点在坐标系一下的坐标,计算圆心坐标与坐标系二原点之间的位置关系,用于验证N点标定与标定转换的结果
3 N点标定
在VisionMaster中的N点标定,主要在相机与机械手之间进行。涉及的两个坐标系分别是图像坐标系与机械手BASE坐标系。特征点在图像坐标下通过图像处理直接获取,机械手下的坐标又分为绝对坐标与相对坐标两种方式。

3.1 绝对式机械手坐标
使用绝对式机械手坐标的方式不需要关系物理坐标系参数分组下的参数。

输入机械手坐标后,点击运行按钮,如果输入的图像坐标与机械手坐标是一一对应且坐标值无误,将显示下图中的S形图案。

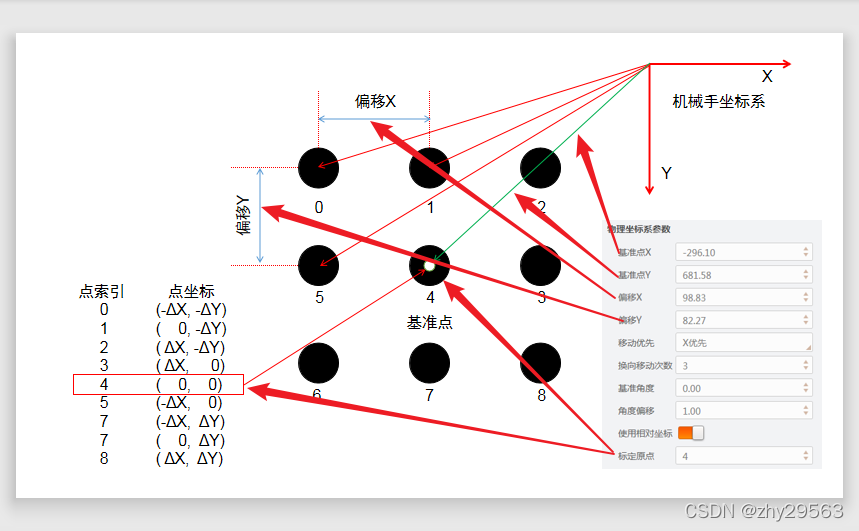
3.2 相对式机械手坐标


4. 圆查找
获取特征的圆心在像素坐标系下的坐标。

5. 标定转换

- 坐标类型
用于指定输入的坐标点与角度所在的坐标系 - 坐标点
待转换的点坐标 - 角度
待转换的角度 - 加载标定文件
用以执行标定转换所使用的编订文件
6. 结果验证
通过圆查找获取圆特征的圆心在像素坐标系下的坐标,同时通过边缘交点获取机械手坐标系原点在像素坐标系下的坐标,并计算圆特征的圆心相对于机械手坐标系原点的位置偏移量。





6.1 绝对式机械手坐标

6.2 相对式机械手坐标













