线控转向系统主要分为六大模块,分别是方向盘模块、路感模拟模块、转向执行模块、齿轮齿条模块和左、右转向前轮模块。
先单独对每个子系统进行建模,最后进行联合仿真实验。
第二节:路感模拟模块
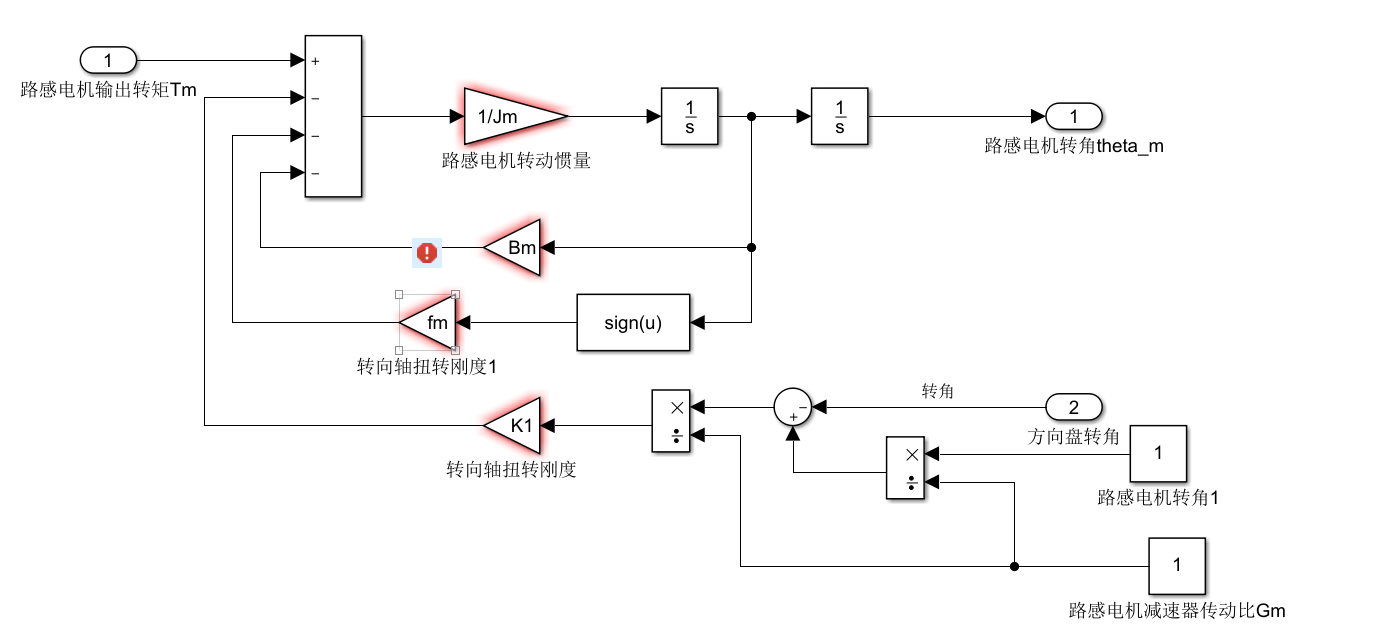
路感模拟模块的主要作用是根据ECU传递过来的信号模拟出一个回正力矩,给予方向盘一个反馈力矩,即通常说的“路感”。路感模拟电机和减速器两个部分组成了路感模拟模块,其运动学平衡方程如下:

Tm:路感电机输出转矩
Jm:路感电机转动惯量
Bm:路感电机阻尼系数
theta_m:路感电机转角
fm:路感电机摩擦系数
Matlab/Simulink建模如下: