什么是FasterRCNN目标检测算法

Faster-RCNN是一个非常有效的目标检测算法,虽然是一个比较早的论文, 但它至今仍是许多目标检测算法的基础。
Faster-RCNN作为一种two-stage的算法,与one-stage的算法相比,two-stage的算法更加复杂且速度较慢,但是检测精度会更高。
事实上也确实是这样,Faster-RCNN的检测效果非常不错,但是检测速度与训练速度有待提高。
源码下载
https://gitee.com/yu_shaonian/faster-rcnn-pytorch.git喜欢的可以点个star噢。
Faster-RCNN实现思路
一、预测部分
1、主干网络介绍
Faster-RCNN可以采用多种的主干特征提取网络,常用的有VGG,Resnet,Xception等等,本文以Resnet网络为例子来给大家演示一下。
Faster-Rcnn对输入进来的图片尺寸没有固定,但是一般会把输入进来的图片短边固定成600,如输入一张1200x1800的图片,会把图片不失真的resize到600x900上。
ResNet50有两个基本的块,分别名为Conv Block和Identity Block,其中Conv Block输入和输出的维度是不一样的,所以不能连续串联,它的作用是改变网络的维度;Identity Block输入维度和输出维度相同,可以串联,用于加深网络的。
Conv Block的结构如下:

Identity Block的结构如下:
这两个都是残差网络结构。
Faster-RCNN的主干特征提取网络部分只包含了长宽压缩了四次的内容,第五次压缩后的内容在ROI中使用。即Faster-RCNN在主干特征提取网络所用的网络层如图所示。
以输入的图片为600x600为例,shape变化如下:

最后一层的输出就是公用特征层。
在代码里里面,我们使用resnet50()函数来获得resnet50的公用特征层。
其中features部分为公用特征层,classifier部分为第二阶段用到的分类器。
import math
import torch.nn as nn
from torchvision.models.utils import load_state_dict_from_url
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, stride=stride, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000):
#-----------------------------------#
# 假设输入进来的图片是600,600,3
#-----------------------------------#
self.inplanes = 64
super(ResNet, self).__init__()
# 600,600,3 -> 300,300,64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
# 300,300,64 -> 150,150,64
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=0, ceil_mode=True)
# 150,150,64 -> 150,150,256
self.layer1 = self._make_layer(block, 64, layers[0])
# 150,150,256 -> 75,75,512
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
# 75,75,512 -> 38,38,1024 到这里可以获得一个38,38,1024的共享特征层
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
# self.layer4被用在classifier模型中
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
#-------------------------------------------------------------------#
# 当模型需要进行高和宽的压缩的时候,就需要用到残差边的downsample
#-------------------------------------------------------------------#
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def resnet50(pretrained = False):
model = ResNet(Bottleneck, [3, 4, 6, 3])
if pretrained:
state_dict = load_state_dict_from_url("https://download.pytorch.org/models/resnet50-19c8e357.pth", model_dir="./model_data")
model.load_state_dict(state_dict)
#----------------------------------------------------------------------------#
# 获取特征提取部分,从conv1到model.layer3,最终获得一个38,38,1024的特征层
#----------------------------------------------------------------------------#
features = list([model.conv1, model.bn1, model.relu, model.maxpool, model.layer1, model.layer2, model.layer3])
#----------------------------------------------------------------------------#
# 获取分类部分,从model.layer4到model.avgpool
#----------------------------------------------------------------------------#
classifier = list([model.layer4, model.avgpool])
features = nn.Sequential(*features)
classifier = nn.Sequential(*classifier)
return features, classifier2、获得Proposal建议框
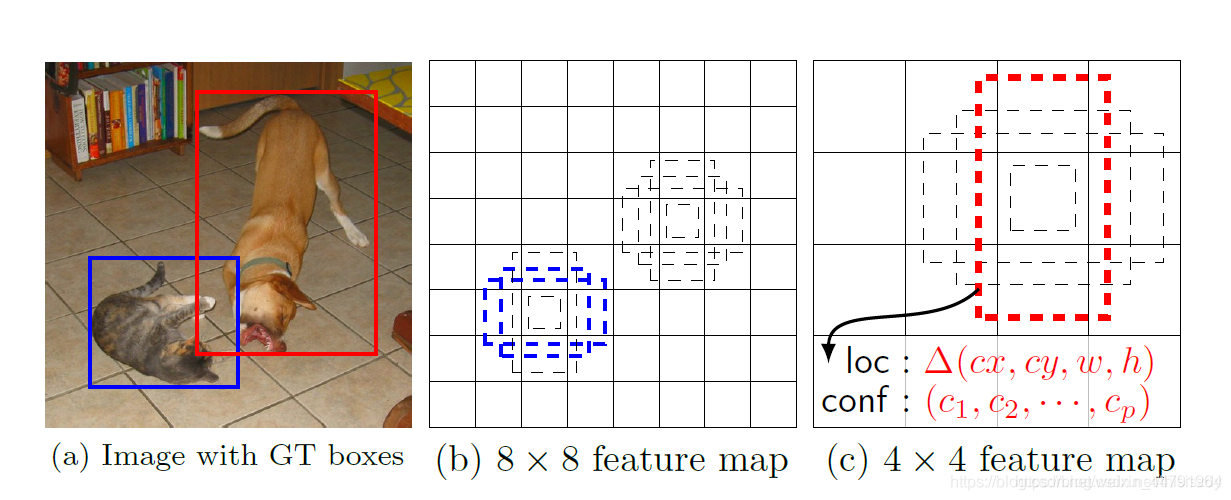
获得的公用特征层在图像中就是Feature Map,其有两个应用,一个是和ROIPooling结合使用、另一个是进行一次3x3的卷积后,进行一个18通道的1x1卷积,还有一个36通道的1x1卷积。
在Faster-RCNN中,num_priors也就是先验框的数量就是9,所以两个1x1卷积的结果实际上也就是:
9 x 4的卷积 用于预测 公用特征层上 每一个网格点上 每一个先验框的变化情况。(为什么说是变化情况呢,这是因为Faster-RCNN的预测结果需要结合先验框获得预测框,预测结果就是先验框的变化情况。)
9 x 2的卷积 用于预测 公用特征层上 每一个网格点上 每一个预测框内部是否包含了物体,序号为1的内容为包含物体的概率。
当我们输入的图片的shape是600x600x3的时候,公用特征层的shape就是38x38x1024,相当于把输入进来的图像分割成38x38的网格,然后每个网格存在9个先验框,这些先验框有不同的大小,在图像上密密麻麻。
9 x 4的卷积的结果会对这些先验框进行调整,获得一个新的框。
9 x 2的卷积会判断上述获得的新框是否包含物体。
到这里我们可以获得了一些有用的框,这些框会利用9 x 2的卷积判断是否存在物体。
到此位置还只是粗略的一个框的获取,也就是一个建议框。然后我们会在建议框里面继续找东西。
实现代码为:
class RegionProposalNetwork(nn.Module):
def __init__(
self,
in_channels = 512,
mid_channels = 512,
ratios = [0.5, 1, 2],
anchor_scales = [8, 16, 32],
feat_stride = 16,
mode = "training",
):
super(RegionProposalNetwork, self).__init__()
#-----------------------------------------#
# 生成基础先验框,shape为[9, 4]
#-----------------------------------------#
self.anchor_base = generate_anchor_base(anchor_scales = anchor_scales, ratios = ratios)
n_anchor = self.anchor_base.shape[0]
#-----------------------------------------#
# 先进行一个3x3的卷积,可理解为特征整合
#-----------------------------------------#
self.conv1 = nn.Conv2d(in_channels, mid_channels, 3, 1, 1)
#-----------------------------------------#
# 分类预测先验框内部是否包含物体
#-----------------------------------------#
self.score = nn.Conv2d(mid_channels, n_anchor * 2, 1, 1, 0)
#-----------------------------------------#
# 回归预测对先验框进行调整
#-----------------------------------------#
self.loc = nn.Conv2d(mid_channels, n_anchor * 4, 1, 1, 0)
#-----------------------------------------#
# 特征点间距步长
#-----------------------------------------#
self.feat_stride = feat_stride
#-----------------------------------------#
# 用于对建议框解码并进行非极大抑制
#-----------------------------------------#
self.proposal_layer = ProposalCreator(mode)
#--------------------------------------#
# 对FPN的网络部分进行权值初始化
#--------------------------------------#
normal_init(self.conv1, 0, 0.01)
normal_init(self.score, 0, 0.01)
normal_init(self.loc, 0, 0.01)
def forward(self, x, img_size, scale=1.):
n, _, h, w = x.shape
#-----------------------------------------#
# 先进行一个3x3的卷积,可理解为特征整合
#-----------------------------------------#
x = F.relu(self.conv1(x))
#-----------------------------------------#
# 回归预测对先验框进行调整
#-----------------------------------------#
rpn_locs = self.loc(x)
rpn_locs = rpn_locs.permute(0, 2, 3, 1).contiguous().view(n, -1, 4)
#-----------------------------------------#
# 分类预测先验框内部是否包含物体
#-----------------------------------------#
rpn_scores = self.score(x)
rpn_scores = rpn_scores.permute(0, 2, 3, 1).contiguous().view(n, -1, 2)
#--------------------------------------------------------------------------------------#
# 进行softmax概率计算,每个先验框只有两个判别结果
# 内部包含物体或者内部不包含物体,rpn_softmax_scores[:, :, 1]的内容为包含物体的概率
#--------------------------------------------------------------------------------------#
rpn_softmax_scores = F.softmax(rpn_scores, dim=-1)
rpn_fg_scores = rpn_softmax_scores[:, :, 1].contiguous()
rpn_fg_scores = rpn_fg_scores.view(n, -1)3、Proposal建议框的解码
通过第二步我们获得了38x38x9个先验框的预测结果。预测结果包含两部分。
9 x 4的卷积 用于预测 公用特征层上 每一个网格点上 每一个先验框的变化情况。**
9 x 2的卷积 用于预测 公用特征层上 每一个网格点上 每一个预测框内部是否包含了物体。
相当于就是将整个图像分成38x38个网格;然后从每个网格中心建立9个先验框,一共38x38x9个,12996个先验框。
当输入图像shape不同时,先验框的数量也会发生改变。
先验框虽然可以代表一定的框的位置信息与框的大小信息,但是其是有限的,无法表示任意情况,因此还需要调整。
9 x 4中的9表示了这个网格点所包含的先验框数量,其中的4表示了框的中心与长宽的调整情况。
实现代码如下:
class ProposalCreator():
def __init__(
self,
mode,
nms_iou = 0.7,
n_train_pre_nms = 12000,
n_train_post_nms = 600,
n_test_pre_nms = 3000,
n_test_post_nms = 300,
min_size = 16
):
#-----------------------------------#
# 设置预测还是训练
#-----------------------------------#
self.mode = mode
#-----------------------------------#
# 建议框非极大抑制的iou大小
#-----------------------------------#
self.nms_iou = nms_iou
#-----------------------------------#
# 训练用到的建议框数量
#-----------------------------------#
self.n_train_pre_nms = n_train_pre_nms
self.n_train_post_nms = n_train_post_nms
#-----------------------------------#
# 预测用到的建议框数量
#-----------------------------------#
self.n_test_pre_nms = n_test_pre_nms
self.n_test_post_nms = n_test_post_nms
self.min_size = min_size
def __call__(self, loc, score, anchor, img_size, scale=1.):
if self.mode == "training":
n_pre_nms = self.n_train_pre_nms
n_post_nms = self.n_train_post_nms
else:
n_pre_nms = self.n_test_pre_nms
n_post_nms = self.n_test_post_nms
#-----------------------------------#
# 将先验框转换成tensor
#-----------------------------------#
anchor = torch.from_numpy(anchor)
if loc.is_cuda:
anchor = anchor.cuda()
#-----------------------------------#
# 将RPN网络预测结果转化成建议框
#-----------------------------------#
roi = loc2bbox(anchor, loc)
#-----------------------------------#
# 防止建议框超出图像边缘
#-----------------------------------#
roi[:, [0, 2]] = torch.clamp(roi[:, [0, 2]], min = 0, max = img_size[1])
roi[:, [1, 3]] = torch.clamp(roi[:, [1, 3]], min = 0, max = img_size[0])
#-----------------------------------#
# 建议框的宽高的最小值不可以小于16
#-----------------------------------#
min_size = self.min_size * scale
keep = torch.where(((roi[:, 2] - roi[:, 0]) >= min_size) & ((roi[:, 3] - roi[:, 1]) >= min_size))[0]
#-----------------------------------#
# 将对应的建议框保留下来
#-----------------------------------#
roi = roi[keep, :]
score = score[keep]
#-----------------------------------#
# 根据得分进行排序,取出建议框
#-----------------------------------#
order = torch.argsort(score, descending=True)
if n_pre_nms > 0:
order = order[:n_pre_nms]
roi = roi[order, :]
score = score[order]
#-----------------------------------#
# 对建议框进行非极大抑制
# 使用官方的非极大抑制会快非常多
#-----------------------------------#
keep = nms(roi, score, self.nms_iou)
keep = keep[:n_post_nms]
roi = roi[keep]
return roi4、对Proposal建议框加以利用(RoiPoolingConv)
让我们对建议框有一个整体的理解:
事实上建议框就是对图片哪一个区域有物体存在进行初步筛选。
通过主干特征提取网络,我们可以获得一个公用特征层,当输入图片为600x600x3的时候,它的shape是38x38x1024,然后建议框会对这个公用特征层进行截取。
其实公用特征层里面的38x38对应着图片里的38x38个区域,38x38中的每一个点相当于这个区域内部所有特征的浓缩。
建议框会对这38x38个区域进行截取,也就是认为这些区域里存在目标,然后将截取的结果进行resize,resize到14x14x1024的大小。
然后再对每个建议框再进行Resnet原有的第五次压缩。压缩完后进行一个平均池化,再进行一个Flatten,最后分别进行一个num_classes的全连接和(num_classes)x4全连接。
num_classes的全连接用于对最后获得的框进行分类,(num_classes)x4全连接用于对相应的建议框进行调整。
通过这些操作,我们可以获得所有建议框的调整情况,和这个建议框调整后框内物体的类别。
事实上,在上一步获得的建议框就是ROI的先验框。
对Proposal建议框加以利用的过程与shape变化如图所示:
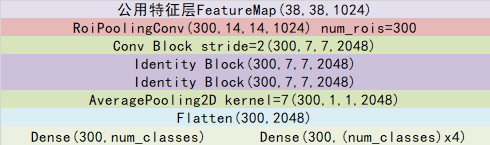
建议框调整后的结果就是最终的预测结果了,可以在图上进行绘画了。
class Resnet50RoIHead(nn.Module):
def __init__(self, n_class, roi_size, spatial_scale, classifier):
super(Resnet50RoIHead, self).__init__()
self.classifier = classifier
#--------------------------------------#
# 对ROIPooling后的的结果进行回归预测
#--------------------------------------#
self.cls_loc = nn.Linear(2048, n_class * 4)
#-----------------------------------#
# 对ROIPooling后的的结果进行分类
#-----------------------------------#
self.score = nn.Linear(2048, n_class)
#-----------------------------------#
# 权值初始化
#-----------------------------------#
normal_init(self.cls_loc, 0, 0.001)
normal_init(self.score, 0, 0.01)
self.roi = RoIPool((roi_size, roi_size), spatial_scale)
def forward(self, x, rois, roi_indices, img_size):
n, _, _, _ = x.shape
if x.is_cuda:
roi_indices = roi_indices.cuda()
rois = rois.cuda()
rois_feature_map = torch.zeros_like(rois)
rois_feature_map[:, [0,2]] = rois[:, [0,2]] / img_size[1] * x.size()[3]
rois_feature_map[:, [1,3]] = rois[:, [1,3]] / img_size[0] * x.size()[2]
indices_and_rois = torch.cat([roi_indices[:, None], rois_feature_map], dim=1)
#-----------------------------------#
# 利用建议框对公用特征层进行截取
#-----------------------------------#
pool = self.roi(x, indices_and_rois)
#-----------------------------------#
# 利用classifier网络进行特征提取
#-----------------------------------#
fc7 = self.classifier(pool)
#--------------------------------------------------------------#
# 当输入为一张图片的时候,这里获得的f7的shape为[300, 2048]
#--------------------------------------------------------------#
fc7 = fc7.view(fc7.size(0), -1)
roi_cls_locs = self.cls_loc(fc7)
roi_scores = self.score(fc7)
roi_cls_locs = roi_cls_locs.view(n, -1, roi_cls_locs.size(1))
roi_scores = roi_scores.view(n, -1, roi_scores.size(1))
return roi_cls_locs, roi_scores5、在原图上进行绘制
在第四步的结尾,我们对建议框进行再一次进行解码后,我们可以获得预测框在原图上的位置,而且这些预测框都是经过筛选的。这些筛选后的框可以直接绘制在图片上,就可以获得结果了。
6、整体的执行流程

几个小tip:
1、共包含了两次解码过程。
2、先进行粗略的筛选再细调。
3、第一次获得的建议框解码后的结果是对共享特征层featuremap进行截取。
二、训练部分
Faster-RCNN的训练过程和它的预测过程一样,分为两部分,首先要训练获得建议框网络,然后再训练后面利用ROI获得预测结果的网络。
1、建议框网络的训练
公用特征层如果要获得建议框的预测结果,需要再进行一次3x3的卷积后,进行一个2通道的1x1卷积,还有一个36通道的1x1卷积。
在Faster-RCNN中,num_priors也就是先验框的数量就是9,所以两个1x1卷积的结果实际上也就是:
9 x 4的卷积 用于预测 公用特征层上 每一个网格点上 每一个先验框的变化情况。(为什么说是变化情况呢,这是因为Faster-RCNN的预测结果需要结合先验框获得预测框,预测结果就是先验框的变化情况。)
9 x 2的卷积 用于预测 公用特征层上 每一个网格点上 每一个预测框内部是否包含了物体。
也就是说,我们直接利用Faster-RCNN建议框网络预测到的结果,并不是建议框在图片上的真实位置,需要解码才能得到真实位置。
而在训练的时候,我们需要计算loss函数,这个loss函数是相对于Faster-RCNN建议框网络的预测结果的。我们需要把图片输入到当前的Faster-RCNN建议框的网络中,得到建议框的结果;同时还需要进行编码,这个编码是把真实框的位置信息格式转化为Faster-RCNN建议框预测结果的格式信息。
也就是,我们需要找到 每一张用于训练的图片的每一个真实框对应的先验框,并求出如果想要得到这样一个真实框,我们的建议框预测结果应该是怎么样的。
从建议框预测结果获得真实框的过程被称作解码,而从真实框获得建议框预测结果的过程就是编码的过程。
因此我们只需要将解码过程逆过来就是编码过程了。
实现代码如下:
def bbox_iou(bbox_a, bbox_b):
if bbox_a.shape[1] != 4 or bbox_b.shape[1] != 4:
print(bbox_a, bbox_b)
raise IndexError
tl = np.maximum(bbox_a[:, None, :2], bbox_b[:, :2])
br = np.minimum(bbox_a[:, None, 2:], bbox_b[:, 2:])
area_i = np.prod(br - tl, axis=2) * (tl < br).all(axis=2)
area_a = np.prod(bbox_a[:, 2:] - bbox_a[:, :2], axis=1)
area_b = np.prod(bbox_b[:, 2:] - bbox_b[:, :2], axis=1)
return area_i / (area_a[:, None] + area_b - area_i)
def bbox2loc(src_bbox, dst_bbox):
width = src_bbox[:, 2] - src_bbox[:, 0]
height = src_bbox[:, 3] - src_bbox[:, 1]
ctr_x = src_bbox[:, 0] + 0.5 * width
ctr_y = src_bbox[:, 1] + 0.5 * height
base_width = dst_bbox[:, 2] - dst_bbox[:, 0]
base_height = dst_bbox[:, 3] - dst_bbox[:, 1]
base_ctr_x = dst_bbox[:, 0] + 0.5 * base_width
base_ctr_y = dst_bbox[:, 1] + 0.5 * base_height
eps = np.finfo(height.dtype).eps
width = np.maximum(width, eps)
height = np.maximum(height, eps)
dx = (base_ctr_x - ctr_x) / width
dy = (base_ctr_y - ctr_y) / height
dw = np.log(base_width / width)
dh = np.log(base_height / height)
loc = np.vstack((dx, dy, dw, dh)).transpose()
return loc
class AnchorTargetCreator(object):
def __init__(self, n_sample=256, pos_iou_thresh=0.7, neg_iou_thresh=0.3, pos_ratio=0.5):
self.n_sample = n_sample
self.pos_iou_thresh = pos_iou_thresh
self.neg_iou_thresh = neg_iou_thresh
self.pos_ratio = pos_ratio
def __call__(self, bbox, anchor):
argmax_ious, label = self._create_label(anchor, bbox)
if (label > 0).any():
loc = bbox2loc(anchor, bbox[argmax_ious])
return loc, label
else:
return np.zeros_like(anchor), label
def _calc_ious(self, anchor, bbox):
#----------------------------------------------#
# anchor和bbox的iou
# 获得的ious的shape为[num_anchors, num_gt]
#----------------------------------------------#
ious = bbox_iou(anchor, bbox)
if len(bbox)==0:
return np.zeros(len(anchor), np.int32), np.zeros(len(anchor)), np.zeros(len(bbox))
#---------------------------------------------------------#
# 获得每一个先验框最对应的真实框 [num_anchors, ]
#---------------------------------------------------------#
argmax_ious = ious.argmax(axis=1)
#---------------------------------------------------------#
# 找出每一个先验框最对应的真实框的iou [num_anchors, ]
#---------------------------------------------------------#
max_ious = np.max(ious, axis=1)
#---------------------------------------------------------#
# 获得每一个真实框最对应的先验框 [num_gt, ]
#---------------------------------------------------------#
gt_argmax_ious = ious.argmax(axis=0)
#---------------------------------------------------------#
# 保证每一个真实框都存在对应的先验框
#---------------------------------------------------------#
for i in range(len(gt_argmax_ious)):
argmax_ious[gt_argmax_ious[i]] = i
return argmax_ious, max_ious, gt_argmax_ious
def _create_label(self, anchor, bbox):
# ------------------------------------------ #
# 1是正样本,0是负样本,-1忽略
# 初始化的时候全部设置为-1
# ------------------------------------------ #
label = np.empty((len(anchor),), dtype=np.int32)
label.fill(-1)
# ------------------------------------------------------------------------ #
# argmax_ious为每个先验框对应的最大的真实框的序号 [num_anchors, ]
# max_ious为每个真实框对应的最大的真实框的iou [num_anchors, ]
# gt_argmax_ious为每一个真实框对应的最大的先验框的序号 [num_gt, ]
# ------------------------------------------------------------------------ #
argmax_ious, max_ious, gt_argmax_ious = self._calc_ious(anchor, bbox)
# ----------------------------------------------------- #
# 如果小于门限值则设置为负样本
# 如果大于门限值则设置为正样本
# 每个真实框至少对应一个先验框
# ----------------------------------------------------- #
label[max_ious < self.neg_iou_thresh] = 0
label[max_ious >= self.pos_iou_thresh] = 1
if len(gt_argmax_ious)>0:
label[gt_argmax_ious] = 1
# ----------------------------------------------------- #
# 判断正样本数量是否大于128,如果大于则限制在128
# ----------------------------------------------------- #
n_pos = int(self.pos_ratio * self.n_sample)
pos_index = np.where(label == 1)[0]
if len(pos_index) > n_pos:
disable_index = np.random.choice(pos_index, size=(len(pos_index) - n_pos), replace=False)
label[disable_index] = -1
# ----------------------------------------------------- #
# 平衡正负样本,保持总数量为256
# ----------------------------------------------------- #
n_neg = self.n_sample - np.sum(label == 1)
neg_index = np.where(label == 0)[0]
if len(neg_index) > n_neg:
disable_index = np.random.choice(neg_index, size=(len(neg_index) - n_neg), replace=False)
label[disable_index] = -1
return argmax_ious, labelfocal会忽略一些重合度相对较高但是不是非常高的先验框,一般将重合度在0.3-0.7之间的先验框进行忽略。
2、Roi网络的训练
通过上一步已经可以对建议框网络进行训练了,建议框网络会提供一些位置的建议,在ROI网络部分,其会将建议框根据进行一定的截取,并获得对应的预测结果,事实上就是将上一步建议框当作了ROI网络的先验框。
因此,我们需要计算所有建议框和真实框的重合程度,并进行筛选,如果某个真实框和建议框的重合程度大于0.5则认为该建议框为正样本,如果重合程度小于0.5则认为该建议框为负样本
因此我们可以对真实框进行编码,这个编码是相对于建议框的,也就是,当我们存在这些建议框的时候,我们的ROI预测网络需要有什么样的预测结果才能将这些建议框调整成真实框。
每次训练我们都放入128个建议框进行训练,同时要注意正负样本的平衡。
实现代码如下:
class ProposalTargetCreator(object):
def __init__(self, n_sample=128, pos_ratio=0.5, pos_iou_thresh=0.5, neg_iou_thresh_high=0.5, neg_iou_thresh_low=0):
self.n_sample = n_sample
self.pos_ratio = pos_ratio
self.pos_roi_per_image = np.round(self.n_sample * self.pos_ratio)
self.pos_iou_thresh = pos_iou_thresh
self.neg_iou_thresh_high = neg_iou_thresh_high
self.neg_iou_thresh_low = neg_iou_thresh_low
def __call__(self, roi, bbox, label, loc_normalize_std=(0.1, 0.1, 0.2, 0.2)):
roi = np.concatenate((roi.detach().cpu().numpy(), bbox), axis=0)
# ----------------------------------------------------- #
# 计算建议框和真实框的重合程度
# ----------------------------------------------------- #
iou = bbox_iou(roi, bbox)
if len(bbox)==0:
gt_assignment = np.zeros(len(roi), np.int32)
max_iou = np.zeros(len(roi))
gt_roi_label = np.zeros(len(roi))
else:
#---------------------------------------------------------#
# 获得每一个建议框最对应的真实框 [num_roi, ]
#---------------------------------------------------------#
gt_assignment = iou.argmax(axis=1)
#---------------------------------------------------------#
# 获得每一个建议框最对应的真实框的iou [num_roi, ]
#---------------------------------------------------------#
max_iou = iou.max(axis=1)
#---------------------------------------------------------#
# 真实框的标签要+1因为有背景的存在
#---------------------------------------------------------#
gt_roi_label = label[gt_assignment] + 1
#----------------------------------------------------------------#
# 满足建议框和真实框重合程度大于neg_iou_thresh_high的作为负样本
# 将正样本的数量限制在self.pos_roi_per_image以内
#----------------------------------------------------------------#
pos_index = np.where(max_iou >= self.pos_iou_thresh)[0]
pos_roi_per_this_image = int(min(self.pos_roi_per_image, pos_index.size))
if pos_index.size > 0:
pos_index = np.random.choice(pos_index, size=pos_roi_per_this_image, replace=False)
#-----------------------------------------------------------------------------------------------------#
# 满足建议框和真实框重合程度小于neg_iou_thresh_high大于neg_iou_thresh_low作为负样本
# 将正样本的数量和负样本的数量的总和固定成self.n_sample
#-----------------------------------------------------------------------------------------------------#
neg_index = np.where((max_iou < self.neg_iou_thresh_high) & (max_iou >= self.neg_iou_thresh_low))[0]
neg_roi_per_this_image = self.n_sample - pos_roi_per_this_image
neg_roi_per_this_image = int(min(neg_roi_per_this_image, neg_index.size))
if neg_index.size > 0:
neg_index = np.random.choice(neg_index, size=neg_roi_per_this_image, replace=False)
#---------------------------------------------------------#
# sample_roi [n_sample, ]
# gt_roi_loc [n_sample, 4]
# gt_roi_label [n_sample, ]
#---------------------------------------------------------#
keep_index = np.append(pos_index, neg_index)
sample_roi = roi[keep_index]
if len(bbox)==0:
return sample_roi, np.zeros_like(sample_roi), gt_roi_label[keep_index]
gt_roi_loc = bbox2loc(sample_roi, bbox[gt_assignment[keep_index]])
gt_roi_loc = (gt_roi_loc / np.array(loc_normalize_std, np.float32))
gt_roi_label = gt_roi_label[keep_index]
gt_roi_label[pos_roi_per_this_image:] = 0
return sample_roi, gt_roi_loc, gt_roi_label训练自己的Faster-RCNN模型
首先前往Github下载对应的仓库,下载完后利用解压软件解压,之后用编程软件打开文件夹。
注意打开的根目录必须正确,否则相对目录不正确的情况下,代码将无法运行。
一定要注意打开后的根目录是文件存放的目录。

一、数据集的准备
本文使用VOC格式进行训练,训练前需要自己制作好数据集,如果没有自己的数据集,可以通过Github连接下载VOC12+07的数据集尝试下。
训练前将标签文件放在VOCdevkit文件夹下的VOC2007文件夹下的Annotation中。

训练前将图片文件放在VOCdevkit文件夹下的VOC2007文件夹下的JPEGImages中。
此时数据集的摆放已经结束。
二、数据集的处理
在完成数据集的摆放之后,我们需要对数据集进行下一步的处理,目的是获得训练用的2007_train.txt以及2007_val.txt,需要用到根目录下的voc_annotation.py。
voc_annotation.py里面有一些参数需要设置。
分别是annotation_mode、classes_path、trainval_percent、train_percent、VOCdevkit_path,第一次训练可以仅修改classes_path
''' annotation_mode用于指定该文件运行时计算的内容 annotation_mode为0代表整个标签处理过程,包括获得VOCdevkit/VOC2007/ImageSets里面的txt以及训练用的2007_train.txt、2007_val.txt annotation_mode为1代表获得VOCdevkit/VOC2007/ImageSets里面的txt annotation_mode为2代表获得训练用的2007_train.txt、2007_val.txt '''
annotation_mode = 0
''' 必须要修改,用于生成2007_train.txt、2007_val.txt的目标信息 与训练和预测所用的classes_path一致即可 如果生成的2007_train.txt里面没有目标信息 那么就是因为classes没有设定正确 仅在annotation_mode为0和2的时候有效 '''
classes_path = 'model_data/voc_classes.txt'
''' trainval_percent用于指定(训练集+验证集)与测试集的比例,默认情况下 (训练集+验证集):测试集 = 9:1 train_percent用于指定(训练集+验证集)中训练集与验证集的比例,默认情况下 训练集:验证集 = 9:1 仅在annotation_mode为0和1的时候有效 '''
trainval_percent = 0.9
train_percent = 0.9
''' 指向VOC数据集所在的文件夹 默认指向根目录下的VOC数据集 '''
VOCdevkit_path = 'VOCdevkit'classes_path用于指向检测类别所对应的txt,以voc数据集为例,我们用的txt为:

训练自己的数据集时,可以自己建立一个cls_classes.txt,里面写自己所需要区分的类别。
三、开始网络训练
通过voc_annotation.py我们已经生成了2007_train.txt以及2007_val.txt,此时我们可以开始训练了。
训练的参数较多,大家可以在下载库后仔细看注释,其中最重要的部分依然是train.py里的classes_path。
classes_path用于指向检测类别所对应的txt,这个txt和voc_annotation.py里面的txt一样!训练自己的数据集必须要修改!

修改完classes_path后就可以运行train.py开始训练了,在训练多个epoch后,权值会生成在logs文件夹中。
其它参数的作用如下:
#-------------------------------#
# 是否使用Cuda
# 没有GPU可以设置成False
#-------------------------------#
Cuda = True
#--------------------------------------------------------#
# 训练前一定要修改classes_path,使其对应自己的数据集
#--------------------------------------------------------#
classes_path = 'model_data/voc_classes.txt'
#----------------------------------------------------------------------------------------------------------------------------#
# 权值文件请看README,百度网盘下载。数据的预训练权重对不同数据集是通用的,因为特征是通用的。
# 预训练权重对于99%的情况都必须要用,不用的话权值太过随机,特征提取效果不明显,网络训练的结果也不会好。
#
# 如果想要断点续练就将model_path设置成logs文件夹下已经训练的权值文件。
# 当model_path = ''的时候不加载整个模型的权值。
#
# 此处使用的是整个模型的权重,因此是在train.py进行加载的,下面的pretrain不影响此处的权值加载。
# 如果想要让模型从主干的预训练权值开始训练,则设置model_path = '',下面的pretrain = True,此时仅加载主干。
# 如果想要让模型从0开始训练,则设置model_path = '',下面的pretrain = Fasle,Freeze_Train = Fasle,此时从0开始训练,且没有冻结主干的过程。
# 一般来讲,从0开始训练效果会很差,因为权值太过随机,特征提取效果不明显。
#----------------------------------------------------------------------------------------------------------------------------#
model_path = 'model_data/voc_weights_resnet.pth'
#------------------------------------------------------#
# 输入的shape大小
#------------------------------------------------------#
input_shape = [600, 600]
#---------------------------------------------#
# vgg或者resnet50
#---------------------------------------------#
backbone = "resnet50"
#----------------------------------------------------------------------------------------------------------------------------#
# 是否使用主干网络的预训练权重,此处使用的是主干的权重,因此是在模型构建的时候进行加载的。
# 如果设置了model_path,则主干的权值无需加载,pretrained的值无意义。
# 如果不设置model_path,pretrained = True,此时仅加载主干开始训练。
# 如果不设置model_path,pretrained = False,Freeze_Train = Fasle,此时从0开始训练,且没有冻结主干的过程。
#----------------------------------------------------------------------------------------------------------------------------#
pretrained = False
#------------------------------------------------------------------------#
# anchors_size用于设定先验框的大小,每个特征点均存在9个先验框。
# anchors_size每个数对应3个先验框。
# 当anchors_size = [8, 16, 32]的时候,生成的先验框宽高约为:
# [90, 180] ; [180, 360]; [360, 720]; [128, 128];
# [256, 256]; [512, 512]; [180, 90] ; [360, 180];
# [720, 360]; 详情查看anchors.py
# 如果想要检测小物体,可以减小anchors_size靠前的数。
# 比如设置anchors_size = [4, 16, 32]
#------------------------------------------------------------------------#
anchors_size = [8, 16, 32]
#----------------------------------------------------#
# 训练分为两个阶段,分别是冻结阶段和解冻阶段。
# 显存不足与数据集大小无关,提示显存不足请调小batch_size。
#----------------------------------------------------#
#----------------------------------------------------#
# 冻结阶段训练参数
# 此时模型的主干被冻结了,特征提取网络不发生改变
# 占用的显存较小,仅对网络进行微调
#----------------------------------------------------#
Init_Epoch = 0
Freeze_Epoch = 50
Freeze_batch_size = 4
Freeze_lr = 1e-4
#----------------------------------------------------#
# 解冻阶段训练参数
# 此时模型的主干不被冻结了,特征提取网络会发生改变
# 占用的显存较大,网络所有的参数都会发生改变
#----------------------------------------------------#
UnFreeze_Epoch = 100
Unfreeze_batch_size = 2
Unfreeze_lr = 1e-5
#------------------------------------------------------#
# 是否进行冻结训练,默认先冻结主干训练后解冻训练。
#------------------------------------------------------#
Freeze_Train = True
#------------------------------------------------------#
# 用于设置是否使用多线程读取数据
# 开启后会加快数据读取速度,但是会占用更多内存
# 内存较小的电脑可以设置为2或者0
#------------------------------------------------------#
num_workers = 4
#----------------------------------------------------#
# 获得图片路径和标签
#----------------------------------------------------#
train_annotation_path = '2007_train.txt'
val_annotation_path = '2007_val.txt'四、训练结果预测
训练结果预测需要用到两个文件,分别是yolo.py和predict.py。
我们首先需要去yolo.py里面修改model_path以及classes_path,这两个参数必须要修改。
model_path指向训练好的权值文件,在logs文件夹里。
classes_path指向检测类别所对应的txt。

完成修改后就可以运行predict.py进行检测了。运行后输入图片路径即可检测。










