1.简介
对于初做车的同学,看见摄像头图像神奇的侧视角难免会有些烦躁,我刚开始也是如此,所以在此,想详细的分享一下我们的透视变换方案。(实战教学)
先上各种效果图。





优点:
使用指针映射透视变换数组,只需要初始化映射一次,后续不需要时间
通用性强,可移植性高
2.摄像头环境
硬件:总钻风摄像头(由于多车组使用沁恒芯片,修改过硬件适应dvp)
镜头:140度镜头,畸变小于5%
摄像头分辨率:120*188(长*宽)
透视图分辨率:100*114(长*宽)
摄像头高度:30cm左右
总钻风是很常见的智能车摄像头,之所以选用140度镜头,是因为其角度大,且畸变率非常小,完全不影响图像处理,可以省去去畸变的烦恼,摄像头120*188是因为其比例可以使视野最大。
3.逆透视简单原理
众所周知,对于十字这个元素,标准赛道(不算路肩、黑胶带),它是一个宽度为45cm的标准正方形。但是因为摄像头角度问题,十字的正方形在图片中是一个梯形。

那嚒我们所要做的,就是根据图片中的这一块梯形(实则是正方形),这一个信息,将图片进行拉伸变换,使之成为标准的俯视图。
公式:
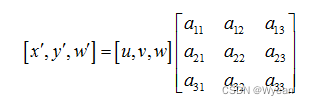
w与w’在二维图中为1
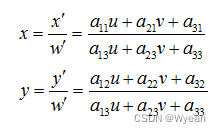
已知结果图中坐标,通过上述公式就能在原图中找到对应的坐标。
那么这个3*3矩阵就是我们需要使用上位机求取的。
4.通过上位机求取矩阵
环境准备:
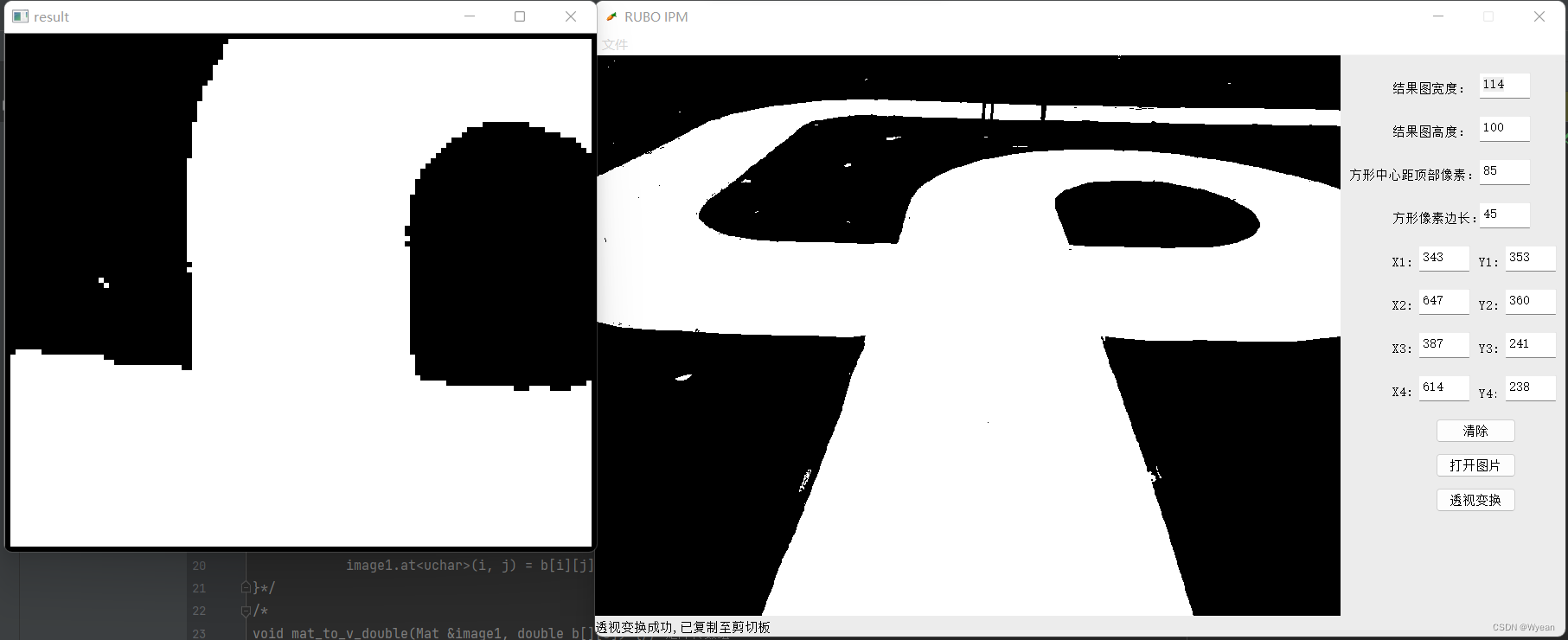
拍摄的十字图像(或正方形图像),灰度与二值化图均可,要能完全展示出正方形部分,如:

图像中可以显示出车头,因为在后续的透视过程中可以通过图像修改参数平移去除。
那么,根据图中的假正方形,就可以进行后续操作。
上位机操作:

结果图宽高:得到的透视图像的宽高。
方形中心距顶部像素:在结果图中,正方形的中心,距离图像最上端多少个像素行(值越大,图像越向下平移)。
方形像素边长:在结果图中,正方形的边长相当于多少个像素(值越大,图片就会被放大更多,如果是45,就是一像素对应1cm距离)。
四个XY值:图中方形四个顶点的坐标,通过鼠标右键在图中点击就可以自动输入(点击顺序:左下---右下---左上---右上)。
逆透视上位机操作
最终矩阵会复制到您的剪切板中,如:
[0.1090909090909082, -0.1138807429130001, 9.053274682306874;
-4.538883118873238e-017, 0.005865102639296149, 3.630498533724316;
-7.131279423880243e-019, -0.001270772238514164, 0.2133919843597247]注意事项:
1.图片经过逆透视操作后得到的结果图,因为对图片进行了拉伸,底边两个角落可能会出现无内容部分(如下图),使用时应当避免.可通过修改结果图大小,或者增大方形中心距顶部像素来对图形进行平移去除。

2.鼠标点击顺序要符合左下---右下---左上---右上。
3.图片路径为中文
5.在智能车上使用矩阵:
原理说明:
求得矩阵后,就可根据矩阵,和结果图的坐标,计算出结果图中的某个点,在原图中的坐标。
但如果每获取到一帧图像,都进行一次映射,非常耗费时间。所以我们使用指针。
在初始化时只需要对指针地址进行一次映射,以后只需要调用指针数组,就可以获取到透视后的图。(需要注意的是,和图像一样的大的指针数组可能会导致您的内存溢出,所以建议将透视图尺寸缩小,即减小RESULT_ROW与RESULT_COL,也可以避免黑边出现)
change_un_Mat[3][3] 是你通过上位机求取的矩阵,在您的剪切板中。
ImageUsed[0][0]代表图像左上角的值
PER_IMG 为用来透视变换的图片,如果使用灰度图,那么ImageUsed就是灰度图的逆透视图,
如果使用二值化图,那么ImageUsed就是二值化的逆透视图
BlackColor的值为没有内容部分的灰度值。
#define RESULT_ROW 100//结果图行列
#define RESULT_COL 114
#define USED_ROW 120 //用于透视图的行列
#define USED_COL 188
#define PER_IMG mt9v03x_image_dvp//mt9v03x_image_dvp:用于透视变换的图像 也可以使用二值化图
#define ImageUsed *PerImg_ip//*PerImg_ip定义使用的图像,ImageUsed为用于巡线和识别的图像
typedef unsigned char uint8_t; // 无符号 8 bits
uint8_t *PerImg_ip[RESULT_ROW][RESULT_COL];
void ImagePerspective_Init(void) {
static uint8_t BlackColor = 0;
double change_un_Mat[3][3] = { //114w*100h
{ -0.01609759704190238, 0.01932561893613478, -2.040617594981866 }, {
0.0004352209945470896, -0.000367865364438621,
-0.7035606436969671 }, { 1.115951268069474e-005,
0.0001970185393508392, -0.03104642853440032 }, };
for (int i = 0; i < RESULT_COL ;i++) {
for (int j = 0; j < RESULT_ROW ;j++) {
int local_x = (int) ((change_un_Mat[0][0] * i
+ change_un_Mat[0][1] * j + change_un_Mat[0][2])
/ (change_un_Mat[2][0] * i + change_un_Mat[2][1] * j
+ change_un_Mat[2][2]));
int local_y = (int) ((change_un_Mat[1][0] * i
+ change_un_Mat[1][1] * j + change_un_Mat[1][2])
/ (change_un_Mat[2][0] * i + change_un_Mat[2][1] * j
+ change_un_Mat[2][2]));
if (local_x
>= 0&& local_y >= 0 && local_y < USED_ROW && local_x < USED_COL){
PerImg_ip[j][i] = &PER_IMG[local_y][local_x];
}
else {
PerImg_ip[j][i] = &BlackColor; //&PER_IMG[0][0];
}
}
}
}
/*ImageUsed[0][0]代表图像左上角的值*/
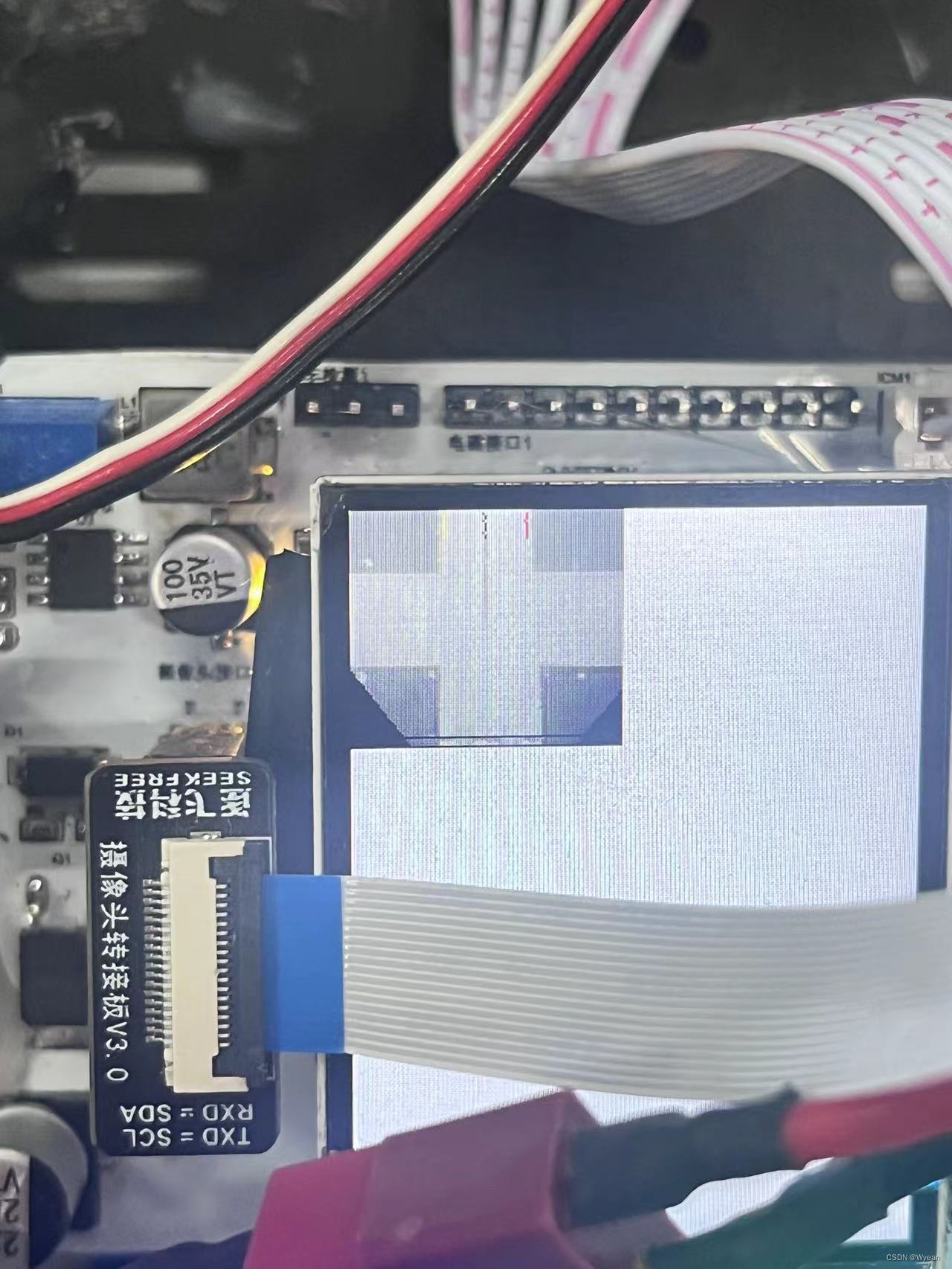
/*完成摄像头初始化后,调用一次ImagePerspective_Init,此后,直接调用ImageUsed 即为透视结果*/屏幕显示透视变换后的灰度图DEMO:
int main(void)
{
All_Init();//屏幕、摄像头、以及其他外设初始化
ImagePerspective_Init();
while(1)
{
if (mt9v03x_finish_flag_dvp == 1) {
uint8_t show[RESULT_ROW][RESULT_COL];
for(int i=0;i<RESULT_ROW;i++)
{
for(int j=0;j<RESULT_COL;j++)
{
show[i][j]=ImageUsed[i][j];
}
}
ips114_show_gray_image(0,0,show[0],RESULT_COL,RESULT_ROW,RESULT_COL,RESULT_ROW,0);
mt9v03x_finish_flag_dvp = 0;
}
}
}效果显示:
6.资源文件
智能车逆透视上位机以及代码-C文档类资源-CSDN下载
代码以及上位机已上传,附带QT编写的上位机代码。
若上位机打开提示缺少dll,将上位机.exe放入dll文件中打开即可。










