论文名称:FCOS: Fully Convolutional One-Stage Object Detection
论文下载地址:
- https://arxiv.org/abs/1904.01355
- https://arxiv.org/abs/2006.09214 (注:2020年更新后的版本,比如center-ness分支有些小改动)
文章目录
0 前言
在之前讲的一些目标检测网络中,比如Faster RCNN系列、SSD、YOLOv2~v5(注意YOLOv1不包括在内)都是基于Anchor进行预测的。即先在原图上生成一堆密密麻麻的Anchor Boxes,然后网络基于这些Anchor去预测它们的类别、中心点偏移量以及宽高缩放因子得到网络预测输出的目标,最后通过NMS即可得到最终预测目标。那基于Anchor的网络存在哪些问题呢,在FCOS论文的Introduction中,作者总结了四点:
- 检测器的性能和Anchor的size以及aspect ratio相关,比如在RetinaNet中改变Anchor(论文中说这是个超参数
hyper-parameters)能够产生约4%的AP变化。换句话说,Anchor要设置的合适才行。 - 一般Anchor的size和aspect ratio都是固定的,所以很难处理那些形状变化很大的目标(比如一本书横着放w远大于h,竖着放h远大于w,斜着放w可能等于h,很难设计出合适的Anchor)。而且迁移到其他任务中时,如果新的数据集目标和预训练数据集中的目标形状差异很大,一般需要重新设计Anchor。
- 为了达到更高的召回率(查全率),一般需要在图片中生成非常密集的Anchor Boxes尽可能保证每个目标都会有Anchor Boxes和它相交。比如说在FPN(Feature Pyramid Network)中会生成超过18万个Anchor Boxes(以输入图片最小边长800为例),那么在训练时绝大部分的Anchor Boxes都会被分为负样本,这样会导致正负样本极度不均。下图是我随手画的样例,红色的矩形框都是负样本,黄色的矩形框是正样本。
- Anchor的引入使得网络在训练过程中更加的繁琐,因为匹配正负样本时需要计算每个Anchor Boxes和每个GT BBoxes之间的IoU。

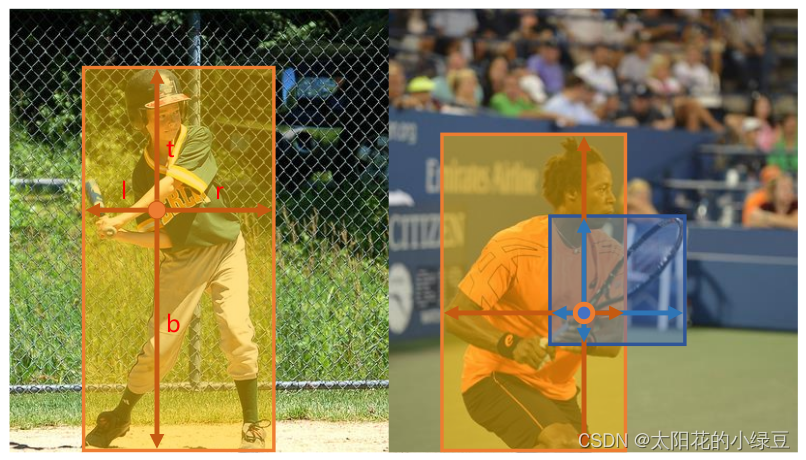
虽然基于Anchor的目标检测网络存在如上所述问题,但并不能否认它的有效性,比如现在非常常用的YOLO v3~v5,它们都是基于Anchor的网络。当然,今天的主角是Anchor-Free,现今有关Anchor-Free的网络也很多,比如DenseBox、YOLO v1、CornerNet、FCOS以及CenterNet等等,而我们今天要聊的网络是FCOS(它不仅是Anchor-Free还是One-Stage,FCN-base detector)。这是一篇发表在2019年CVPR上的文章,这篇文章的想法不仅简单而且很有效,它的思想是跳出Anchor的限制,在预测特征图的每个位置上直接去预测该点分别距离目标左侧(l: left),上侧(t:top),右侧(r: right)以及下侧(b:bottom)的距离,如下图所示。
1 FCOS网络结构
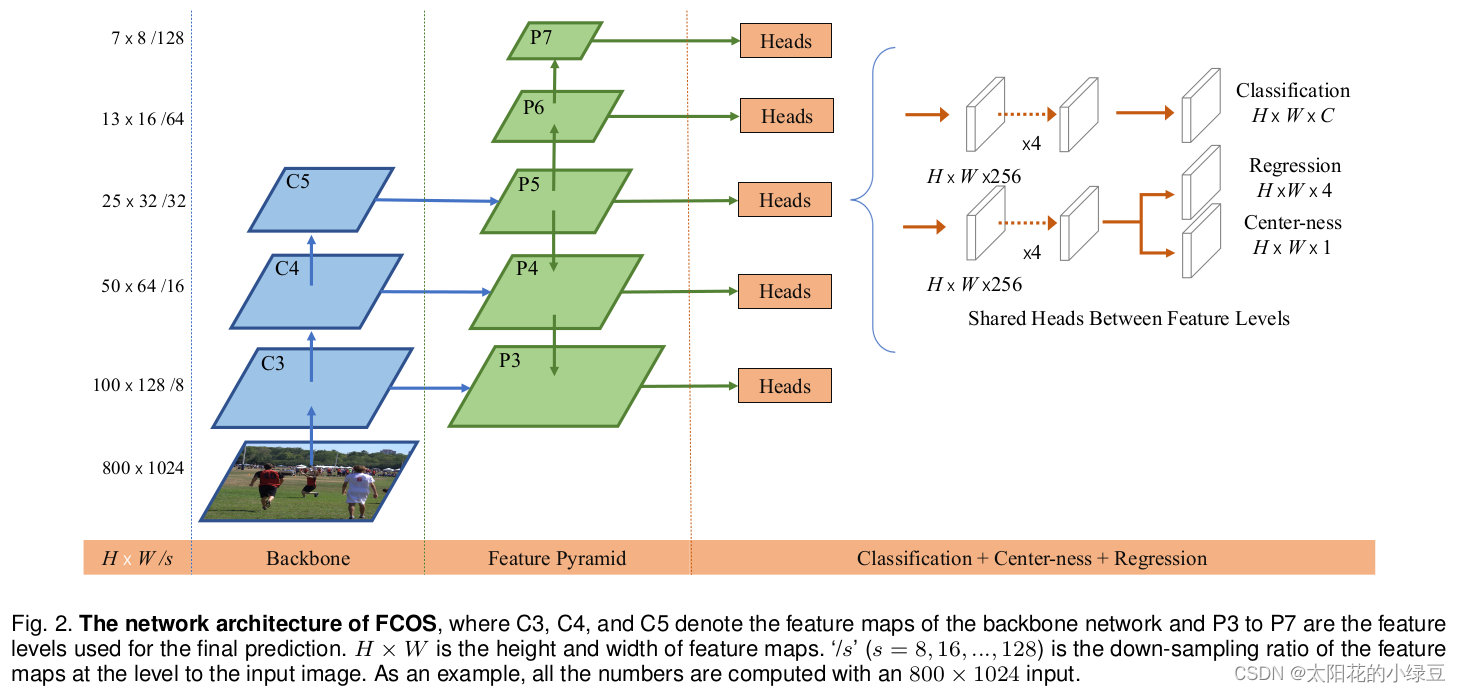
下面这幅图是原论文中给的FCOS网络结构,还是非常清晰的。注意:这张图是2020年发表的版本,和2019年发表的版本有些不同。区别在于Center-ness分支的位置,在2019年论文的图中是将Center-ness分支和Classification分支放在一起的,但在2020年论文的图中是将Center-ness分支和Regression分支放在一起。论文中也有解释,将Center-ness分支和Regression分支放在一起能够得到更好的结果:
下面这张图是我结合Pytorch官方实现FCOS的源码绘制的更加详细的网络结构:
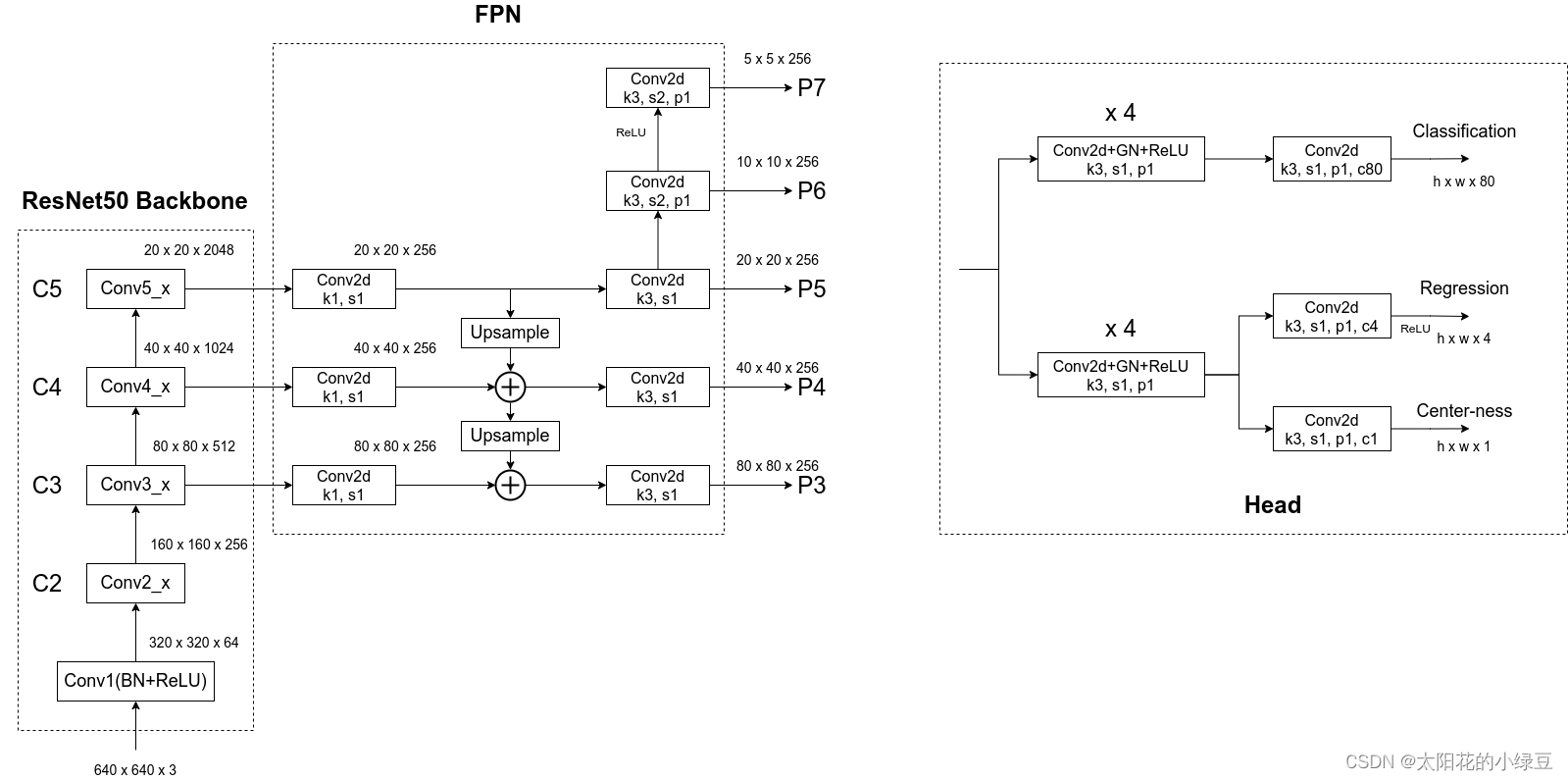
首先看上图左边的部分,Backbone是以ResNet50为例的,FPN是在Backbone输出的C3、C4和C5上先生成P3、P4和P5,接着在P5的基础上通过一个卷积核大小为3x3步距为2的卷积层得到P6,最后在P6的基础上再通过一个卷积核大小为3x3步距为2的卷积层得到P7。接着看右边的Head(注意这里的Head是共享的,即P3~P7都是共用一个Head),细分共有三个分支:Classification、Regression和Center-ness。其中Regression和Center-ness是同一个分支上的两个不同小分支。可以看到每个分支都会先通过4个Conv2d+GN+ReLU的组合模块,然后再通过一个卷积核大小为3x3步距为1的卷积层得到最终的预测结果。
对于Classification分支,在预测特征图的每个位置上都会预测80个score参数(MS COCO数据集目标检测任务的类别数为80)。
对于Regression分支,在预测特征图的每个位置上都会预测4个距离参数(距离目标左侧距离l,上侧距离t,右侧距离r以及下侧距离b,注意,这里预测的数值是相对特征图尺度上的)。假设对于预测特征图上某个点映射回原图的坐标是
(
c
x
,
c
y
)
(c_x, c_y)
(cx,cy),特征图相对原图的步距是s,那么网络预测该点对应的目标边界框坐标为:
x
m
i
n
=
c
x
−
l
⋅
s
,
y
m
i
n
=
c
y
−
t
⋅
s
x
m
a
x
=
c
x
+
r
⋅
s
,
y
m
a
x
=
c
y
+
b
⋅
s
x_{min}=c_x - l \cdot s \ , \ \ y_{min}=c_y - t \cdot s \\ x_{max}=c_x + r \cdot s \ , \ \ y_{max}=c_y + b \cdot s
xmin=cx−l⋅s , ymin=cy−t⋅sxmax=cx+r⋅s , ymax=cy+b⋅s
对于Center-ness分支,在预测特征图的每个位置上都会预测1个参数,center-ness反映的是该点(特征图上的某一点)距离目标中心的远近程度,它的值域在0~1之间,距离目标中心越近center-ness越接近于1,下面是center-ness真实标签的计算公式(计算损失时只考虑正样本,即预测点在目标内的情况,后续会详细讲解)。
c
e
n
t
e
r
n
e
s
s
∗
=
m
i
n
(
l
∗
,
r
∗
)
m
a
x
(
l
∗
,
r
∗
)
×
m
i
n
(
t
∗
,
b
∗
)
m
a
x
(
t
∗
,
b
∗
)
centerness^*=\sqrt{\frac{min(l^*,r^*)}{max(l^*,r^*)} \times \frac{min(t^*,b^*)}{max(t^*,b^*)}}
centerness∗=max(l∗,r∗)min(l∗,r∗)×max(t∗,b∗)min(t∗,b∗)
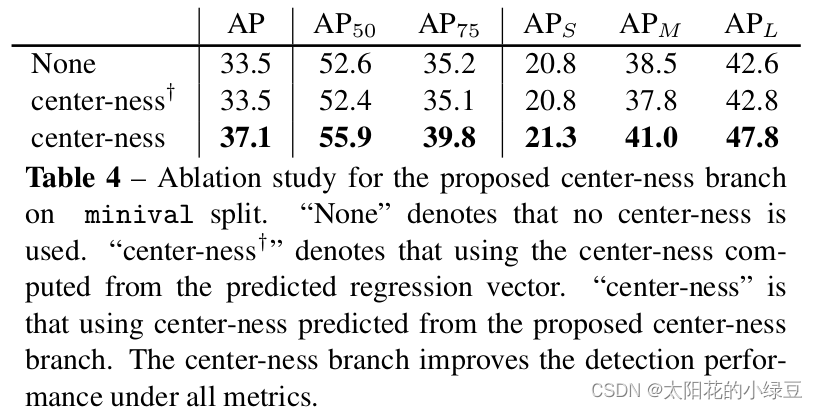
在网络后处理部分筛选高质量bbox时,会将预测的目标class score与center-ness相乘再开根,然后根据得到的结果对bbox进行排序,只保留分数较高的bbox,这样做的目的是筛掉那些目标class score低且预测点距离目标中心较远的bbox,最终保留下来的就是高质量的bbox。下表展示了使用和不使用center-ness对AP的影响,我们只看第一行和第三行,不使用center-ness时AP为33.5,使用center-ness后AP提升到37.1,说明center-ness对FCOS网络还是很有用的。
2 正负样本的匹配
在计算损失之前,我们需要进行正负样本的匹配。在基于Anchor的目标检测网络中,一般会通过计算每个Anchor Box与每个GT的IoU配合事先设定的IoU阈值去匹配。比如某个Anchor Box与某个GT的IoU大于0.7,那么我们就将该Anchor Box设置为正样本。但对于Anchor-Free的网络根本没有Anchor,那该如何匹配正负样本呢。在2020年版本的论文2.1章节中有这样一段话:
最开始的一句话是说,对于特征图上的某一点
(
x
,
y
)
(x,y)
(x,y),只要它落入GT box中心区域,那么它就被视为正样本(其实在2019年的文章中,最开始说的是只要落入GT内就算正样本)。对应的参考文献[42]就是2019年发表的FCOS版本。但在2020年发表的FCOS版本中,新加了一条规则,在满足以上条件外,还需要满足点
(
x
,
y
)
(x,y)
(x,y)在
(
c
x
−
r
s
,
c
y
−
r
s
,
c
x
+
r
s
,
c
y
+
r
s
)
(c_x - rs, c_y - rs, c_x + rs, c_y + rs)
(cx−rs,cy−rs,cx+rs,cy+rs)这个sub-box范围内,其中
(
c
x
,
c
y
)
(c_x, c_y)
(cx,cy)是GT的中心点,s是特征图相对原图的步距,r是一个超参数控制距离GT中心的远近,在COCO数据集中r设置为1.5,关于r的消融实验可以看2020版论文的表6。换句话说点
(
x
,
y
)
(x,y)
(x,y)不仅要在GT的范围内,还要离GT的中心点
(
c
x
,
c
y
)
(c_x, c_y)
(cx,cy)足够近才能被视为正样本。
为了方便大家理解我画了下面这幅图,假设上面两个feature map对应的是同一个特征图,将特征图上的每个点映射回原图就是下面图片中黑色的圆点。根据2019年发表论文的匹配准则,只要落入GT box就算正样本,所以左侧的feature map中打勾的位置都被视为正样本。根据2020年的版本,不仅要落入GT Box还要在
(
c
x
−
r
s
,
c
y
−
r
s
,
c
x
+
r
s
,
c
y
+
r
s
)
(c_x - rs, c_y - rs, c_x + rs, c_y + rs)
(cx−rs,cy−rs,cx+rs,cy+rs)这个sub-box范围内,所以右侧的feature map中打勾的位置都被视为正样本。

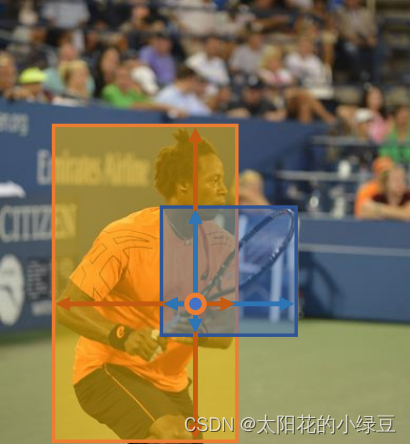
这里肯定有人会问,如果feature map上的某个点同时落入两个GT Box内(即两个GT Box相交区域),那该点到底分配给哪个GT Box,这就是论文中提到的Ambiguity问题。如下图所示,橙色圆圈对应的点同时落入人和球拍两个GT Box中,此时默认将该点分配给面积Area最小的GT Box,即图中的球拍。其实引入FPN后能够减少这种情况,后面4.1章节会讲。
3 损失计算
在前面讲FCOS网络结构中有提到,Head总共有三个输出分支:Classification、Regression和Center-ness。故损失由分类损失
L
c
l
s
L_{cls}
Lcls、定位损失
L
r
e
g
L_{reg}
Lreg以及center-ness损失
L
c
t
r
n
e
s
s
L_{ctrness}
Lctrness三部分共同组成:
L
(
{
p
x
,
y
}
,
{
t
x
,
y
}
,
{
s
x
,
y
}
)
=
1
N
p
o
s
∑
x
,
y
L
c
l
s
(
p
x
,
y
,
c
x
,
y
∗
)
+
1
N
p
o
s
∑
x
,
y
1
{
c
x
,
y
∗
>
0
}
L
r
e
g
(
t
x
,
y
,
t
x
,
y
∗
)
+
1
N
p
o
s
∑
x
,
y
1
{
c
x
,
y
∗
>
0
}
L
c
t
r
n
e
s
s
(
s
x
,
y
,
s
x
,
y
∗
)
\begin{aligned} L(\{p_{x,y}\},\{t_{x,y}\}, \{s_{x,y}\}) & = \frac{1}{N_{pos}}\sum_{x,y}L_{cls}(p_{x,y},c^*_{x,y}) \\ & + \frac{1}{N_{pos}}\sum_{x,y} 1_{\{c^*_{x,y}>0\}}L_{reg}(t_{x,y},t^*_{x,y}) \\ & + \frac{1}{N_{pos}}\sum_{x,y} 1_{\{c^*_{x,y}>0\}}L_{ctrness}(s_{x,y}, s^*_{x,y}) \end{aligned}
L({px,y},{tx,y},{sx,y})=Npos1x,y∑Lcls(px,y,cx,y∗)+Npos1x,y∑1{cx,y∗>0}Lreg(tx,y,tx,y∗)+Npos1x,y∑1{cx,y∗>0}Lctrness(sx,y,sx,y∗)
其中:
- p x , y p_{x,y} px,y表示在特征图 ( x , y ) (x,y) (x,y)点处预测的每个类别的score
- c x , y ∗ c^*_{x,y} cx,y∗表示在特征图 ( x , y ) (x,y) (x,y)点对应的真实类别标签
- 1 { c x , y ∗ > 0 } 1_{\{c^*_{x,y}>0\}} 1{cx,y∗>0}当特征图 ( x , y ) (x,y) (x,y)点被匹配为正样本时为1,否则为0
- t x , y t_{x,y} tx,y表示在特征图 ( x , y ) (x,y) (x,y)点处预测的目标边界框信息
- t x , y ∗ t^*_{x,y} tx,y∗表示在特征图 ( x , y ) (x,y) (x,y)点对应的真实目标边界框信息
-
s
x
,
y
s_{x,y}
sx,y表示在特征图
(
x
,
y
)
(x,y)
(x,y)点处预测的
center-ness -
s
x
,
y
∗
s^*_{x,y}
sx,y∗表示在特征图
(
x
,
y
)
(x,y)
(x,y)点对应的真实
center-ness
对于分类损失
L
c
l
s
L_{cls}
Lcls采用bce_focal_loss,即二值交叉熵损失配合focal_loss,计算损失时所有样本都会参与计算(正样本和负样本)。定位损失
L
r
e
g
L_{reg}
Lreg采用giou_loss(在2019版中采用iou_loss,但在2020版中说采用giou_loss会更好一点),计算损失时只有正样本参与计算。center-ness损失采用二值交叉熵损失,计算损失时只有正样本参与计算。
在匹配正负样本过程中,对于特征图
(
x
,
y
)
(x,y)
(x,y)点处对应的GT信息
c
x
,
y
∗
c^*_{x,y}
cx,y∗和
t
x
,
y
∗
t^*_{x,y}
tx,y∗比较好得到,只要匹配到某一GT目标则
c
x
,
y
∗
c^*_{x,y}
cx,y∗对应GT的类别,
t
x
,
y
∗
t^*_{x,y}
tx,y∗对应GT的bbox。而获取真实的center-ness(
s
x
,
y
∗
s^*_{x,y}
sx,y∗)要复杂一点,下面是
s
x
,
y
∗
s^*_{x,y}
sx,y∗的计算公式,前面有提到过。
c
e
n
t
e
r
n
e
s
s
∗
=
m
i
n
(
l
∗
,
r
∗
)
m
a
x
(
l
∗
,
r
∗
)
×
m
i
n
(
t
∗
,
b
∗
)
m
a
x
(
t
∗
,
b
∗
)
centerness^*=\sqrt{\frac{min(l^*,r^*)}{max(l^*,r^*)} \times \frac{min(t^*,b^*)}{max(t^*,b^*)}}
centerness∗=max(l∗,r∗)min(l∗,r∗)×max(t∗,b∗)min(t∗,b∗)
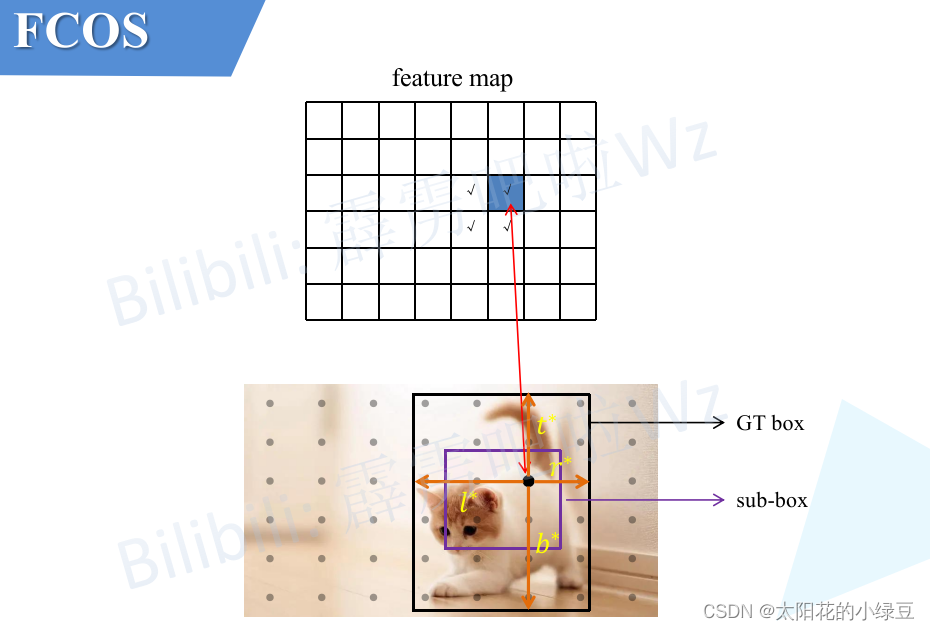
为了方便大家理解,同样画了一幅图,如下图所示。假设对于特征图上的某一个点(图中用蓝色填充的cell)映射回原图,对应图片中的黑色点。然后计算该点距离GT box左侧,上测,右侧,下侧的距离就能得到
l
∗
,
t
∗
,
r
∗
,
b
∗
l^*,t^*,r^*,b^*
l∗,t∗,r∗,b∗ 再套用上面的公式就能得到
s
x
,
y
∗
s^*_{x,y}
sx,y∗(这里的
l
∗
,
t
∗
,
r
∗
,
b
∗
l^*,t^*,r^*,b^*
l∗,t∗,r∗,b∗无论是计算特征图尺度上的还是原图尺度上的都无所谓,因为
c
e
n
t
e
r
n
e
s
s
∗
centerness^*
centerness∗对尺度不敏感)。
4 其他
4.1 Ambiguity问题
在论文中专门有一部分内容用来分析ambiguous samples问题,即在匹配正样本时当特征图上的某一点同时落入多个GT Box内时,到底应该分配给哪一个GT的问题:
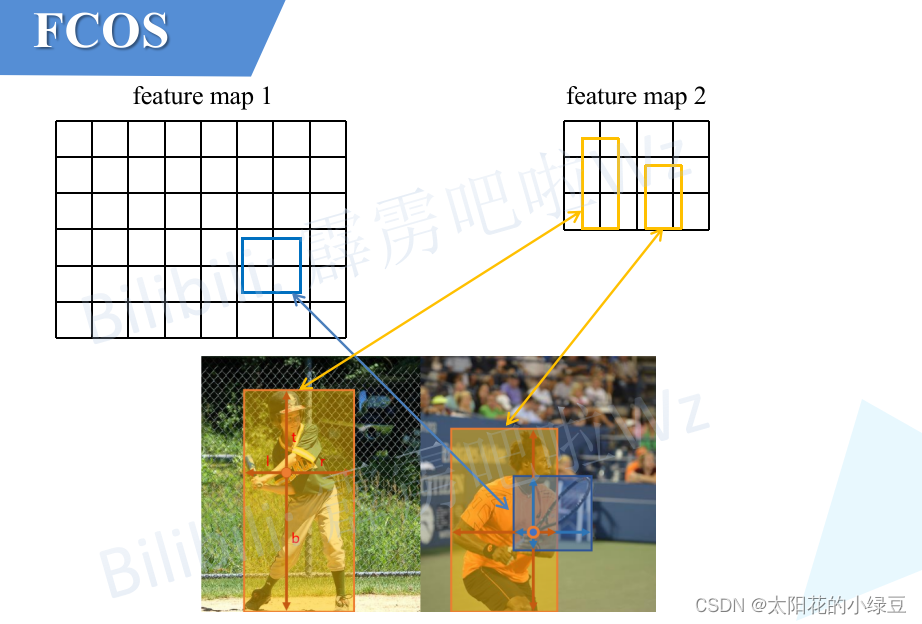
前面在讲正负样本匹配内容时,有提到过当特征图上的某一点同时落入多个GT Box内时,默认将该点分配给面积Area最小的GT Box,当然这并不是一个很好的解决办法。ambiguous samples的存在始终会对网络的学习以及预测产生干扰。作者在COCO2017的val数据上进行了分析,作者发现如果不使用FPN结构时(仅在P4特征层上进行预测)会存在大量的ambiguous samples(大概占23.16%),如果启用FPN结构ambiguous samples会大幅降低(大概占7.24%)。因为在FPN中会采用多个预测特征图,不同尺度的特征图负责预测不同尺度的目标。比如P3负责预测小型目标,P5负责预测中等目标,P7负责预测大型目标。下面我也画了一幅示意图,比如对于小型目标球拍,根据尺度划分准则(4.2中会讲)它被划分到feature map 1上,而对于大型目标人,根据尺度划分准则被划分到feature map 2上,这样在匹配正负样本时能够将部分重叠在一起的目标(这里主要指不同尺度的目标)给分开,即解决了大部分ambiguous samples问题。
如果再采用center sampling匹配准则(即在2020年更新的FCOS版本中,匹配正样本时要求不仅要落入GT Box还要在
(
c
x
−
r
s
,
c
y
−
r
s
,
c
x
+
r
s
,
c
y
+
r
s
)
(c_x - rs, c_y - rs, c_x + rs, c_y + rs)
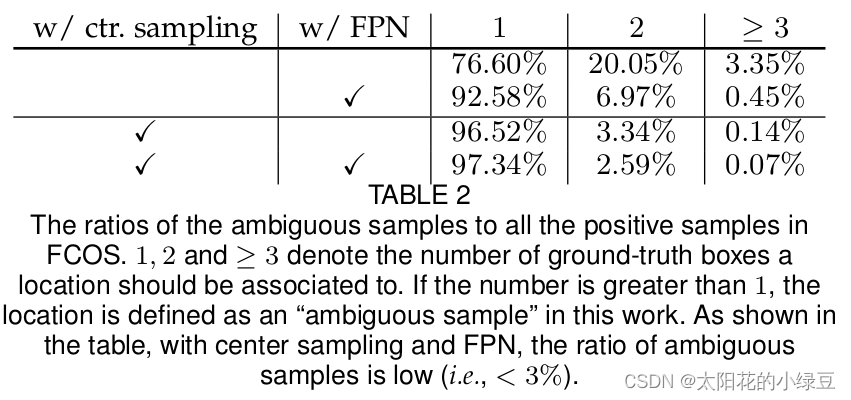
(cx−rs,cy−rs,cx+rs,cy+rs)这个sub-box范围内)能够进一步降低ambiguous samples的比例(小于3%)。在论文表2中(2020版)有给出ambiguous samples比例的消融实验结果。
4.2 Assigning objects to FPN
这部分内容只在2020版的论文中有进行讨论。在上面已经讨论了使用FPN结构能够降低ambiguous samples的比例。那么按照怎样的准则将目标划分到对应尺度的特征图上呢?在FPN中是采用如下计算公式分配的,之前在讲FPN时有详细讲过,这里不在赘述,如果有不了解的可以翻看之前的视频,https://b23.tv/Qhn6xA
k = ⌊ k 0 + l o g 2 ( w h / 224 ) ⌋ k = \left \lfloor {k_0 + log_2(\sqrt{wh} / 224)} \right \rfloor k=⌊k0+log2(wh/224)⌋
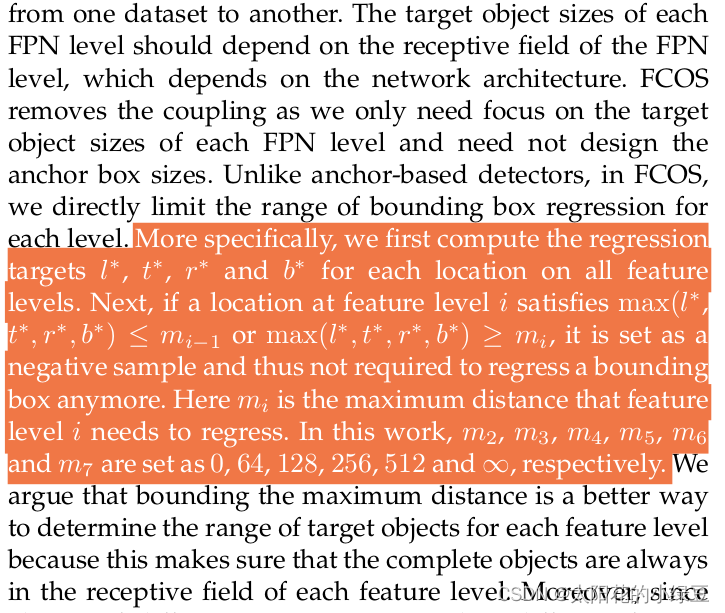
但在FCOS中,作者发现直接套用FPN中的公式效果并不是很好。作者猜测是因为按照FPN中的分配准则,不能确保目标在对应感受野范围内。比如对于某个特征层,每个cell的感受野为28x28,但分配到该特征层上的目标为52x52(举的这个例子可能不太恰当,因为head中采用的都是3x3大小的卷积层)。
接着作者自己也尝试了其他的一些匹配策略,如下表7:
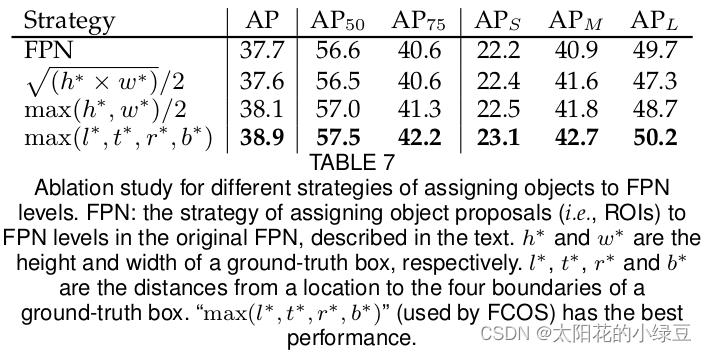
最终采用的是
m
a
x
(
l
∗
,
t
∗
,
r
∗
,
b
∗
)
max(l^*,t^*,r^*,b^*)
max(l∗,t∗,r∗,b∗)策略,其中
l
∗
,
t
∗
,
r
∗
,
b
∗
l^*,t^*,r^*,b^*
l∗,t∗,r∗,b∗分别代表某点(特征图映射在原图上)相对GT Box左边界、上边界、右边界以及下边界的距离(在上面3 损失计算中有讲过)。关于这个策略在2020版论文的2.2章节中介绍的很清楚,对于不同的预测特征层只要满足以下公式即可,比如说对于P4特征图只要
m
a
x
(
l
∗
,
t
∗
,
r
∗
,
b
∗
)
max(l^*,t^*,r^*,b^*)
max(l∗,t∗,r∗,b∗)在
(
64
,
128
)
(64,128)
(64,128)之间即为正样本:
m
i
−
1
<
m
a
x
(
l
∗
,
t
∗
,
r
∗
,
b
∗
)
<
m
i
m_{i-1} < max(l^*,t^*,r^*,b^*) < m_i
mi−1<max(l∗,t∗,r∗,b∗)<mi
关于原文中的介绍如下,这里就不再进一步讲解了,大家自己看看就知道了。
到此,有关FCOS的内容就基本讲完了。如果觉得这篇文章对你有用,记得点赞、收藏并分享给你的小伙伴们哦😄。










