1 简介
 编辑
编辑
编辑
编辑
编辑
编辑
2 部分代码
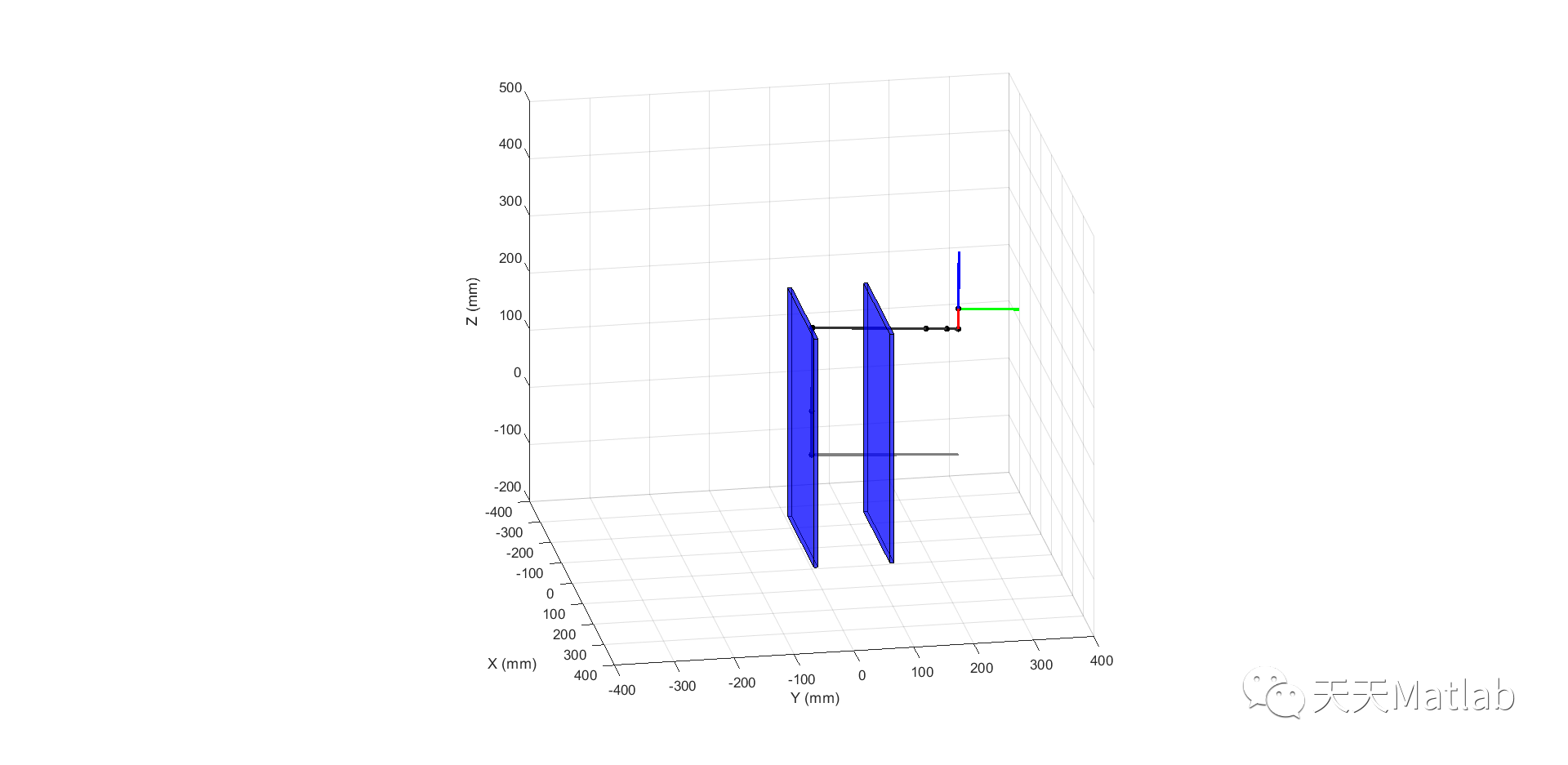
function lynxStart(varargin)% lynxStart Loads kinematic data for a Lynx AL5D manipulator and sets% variables.%% If using hardware:% Starts the Lynx and moves the Lynx to its home position.%% WARNING: Be aware of the Lynx's position before turning on the% controller. To prevent damage, remove any objects in the path between% the current position and the home position. If the Lynx is likely to% slam into the table surface or other immovable object, manually move% the Lynx towards the home position before using this command.%% Options Values {Default Value}% 'Hardware' 'Legend' | 'Lucky' | 'Lyric' | {'off'} Sets up the code to use the Lynx% hardware. If hardware is enabled then there% is no visualization. Default is simulation.% Be careful to read the above warning before% enabling hardware.%% 'Port' string. e.g. 'com3' - The com port may change.% Go to Device manager on a PC to find the port.% To use the Lynx with a MAC, see instructions in% lynxInitializeHardware.m%% 'Joints' {'on'} | 'off' Display the joints of the robot%% 'Frame' {'on'} | 'off' Display the end effector frame%% 'Shadow' {'on'} | 'off' Plot the shadow of the robot on the% ground plane%% 'Gripper' 'on' | {'off'} Plot the gripper. Cool, but is it% really helpful?%% Updated for MEAM 520, 2018. May still have a few bugs, so please let us% know if you find any bugs. And better yet, suggest how to fix it =)global lynx pennkeysaddpath('utils')%%SET THISpennkeys = 'sol';robot_spec_file = 'utils/robot_specs.json';file_spec = fopen(robot_spec_file);jsobj = jsondecode(fscanf(file_spec, '%c', inf));fclose(file_spec);lynx.param = jsobj.('Simulation');lynx.servoTimeStamp = tic;lynx.lidarTimeStamp = tic;lynx.firstFrame = true;lynx.showFrame = true;lynx.showJoints = true;lynx.showShadow = true;lynx.showGripper = false;lynx.hardware_on = false;% Home poselynx.q = [0,0,0,0,0,0];% Check property inputs is even (each property must be paired with a value)if mod(size(varargin,2), 2) == 1 error('Must be a value for each property set')endfor j = 1:2:size(varargin,2) % Use the Lynx hardware or simulation if strcmpi(varargin{1,j}, 'Hardware') hardware_config = varargin{1,j+1}; if strcmpi(hardware_config, 'off') lynx.hardware_on = false; elseif strcmpi(hardware_config, 'Legend') || ... strcmpi(hardware_config, 'Lucky') || ... strcmpi(hardware_config, 'Loopy') || ... strcmpi(hardware_config, 'Lyric') lynx.hardware_on = true; lynx.param = jsobj.(hardware_config); else error('Invalid value for Hardware property'); end elseif strcmpi(varargin{1,j}, 'Port') lynx.serialPort = varargin{1,j+1}; elseif strcmpi(varargin{1,j}, 'Joints') if strcmpi(varargin{1,j+1}, 'off') lynx.showJoints = false; elseif strcmpi(varargin{1,j+1}, 'on') lynx.showJoints = true; else error('Invalid value for Joints property'); end elseif strcmpi(varargin{1,j}, 'Frame') if strcmpi(varargin{1,j+1}, 'off') lynx.showFrame = false; elseif strcmpi(varargin{1,j+1}, 'on') lynx.showFrame = true; else error('Invalid value for Frame property'); end elseif strcmpi(varargin{1,j}, 'Shadow') if strcmpi(varargin{1,j+1}, 'off') lynx.showShadow = false; elseif strcmpi(varargin{1,j+1}, 'on') lynx.showShadow = true; else error('Invalid value for Shadow property'); end elseif strcmpi(varargin{1,j}, 'Gripper') if strcmpi(varargin{1,j+1}, 'off') lynx.showGripper = false; elseif strcmpi(varargin{1,j+1}, 'on') lynx.showGripper = true; else error('Invalid value for Gripper property'); end endend% Initialize the Lynx if using hardwareif lynx.hardware_on % Display warning message str = input(['Warning: Be aware of the Lynx''s position before continuing.\n'... 'Hold the lynx as close to the home position as possible.\n' ... 'Do you want to continue (y/n)?\n'],'s'); if isempty(str) str = 'n'; end if strcmpi(str, 'y') || strcmpi(str, 'yes') %Opens serial communication with the lynx %serialPort is a string. e.g. 'com3' %The com port may change. Go to Device manager on a PC to find the port. %Close any previous communication. delete(instrfindall); %Alternatively, on a MAC, %ttl = serial('/dev/cu.usbserial-AI0484D4'); %Note that the portion after the hypen depends on the usb cable. Type %ls /dev/cu.* into the command line to find this name. lynx.serialPort = serial(lynx.serialPort, 'BaudRate', 115200, 'Terminator', 'CR'); fopen(lynx.serialPort); if(~strcmp(lynx.serialPort.Status,'open')) error('Please connect the Lynx robot via the USB port'); end % send a handshaking frame % if lynx.controlBoard == 'botboarduino' % fprintf(lynx.serialPort, '%s\r', 'tick') % end else disp('Start cancelled.'); end% Initialize the plot if using simulationelse plotLynx(lynx.q);end% Set global variables in the base workspaceevalin('base', 'global lynx pennkeys')%Send the robot to a home configurationlynxServo(lynx.q);3 仿真结果
编辑
4 参考文献
[1]祝敬, 杨马英. 基于改进人工势场法的机械臂避障路径规划[J]. 计算机测量与控制, 2018, 26(10):6.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。

编辑










