Quaternions are used to represent rotations and orientations.Quaternions can be used for stable and constant interpolation of orientations, something that cannot be done well with Euler angles.
四元数用于表示旋转和方向。四元数可以用于稳定和恒定的方向插值,这在欧拉角上是做不好的。
4.3.1 Mathematical Background
4.3.1数学背景

The variable qw is called the real part of a quaternion, ˆq. The imaginary part is qv,and i, j, and k are called imaginary units.
变量qw叫做四元数ˆq的实部,虚部叫做qv,I,j,k叫做虚部单位。
Using the definition of the quaternion, the multiplication operation between two quaternions, ˆq and ˆr, is derived as shown below. Note that the multiplication of the imaginary units is noncommutative.
利用四元数的定义,推导出两个四元数q和r之间的乘法运算,如下所示。注意虚数单位的乘法是非交换的。

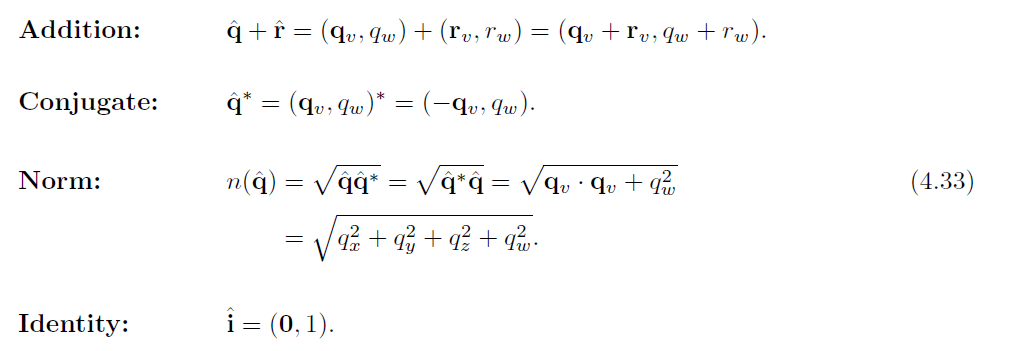
Along with the definition of the quaternion, the definitions of addition, conjugate,norm, and an identity are needed:
除了四元数的定义,还需要加法、共轭、范数和恒等式的定义: