1.算法描述 双目相机一般由左眼和右眼两个水平放置的相机组成。当然也可以做成上下两个目,但我们见到的主流双目都是做成左右的。在左右双目的相机中,我们可以把两个相机都看作针孔相机。它们是水平放置的,意味两个相机的光圈中心都位于x轴上。它们的距离称为双目相机的基线(Baseline,记作b),是双目的重要参数。双目相机一般由左眼和右眼两个水平放置的相机组成。当然也可以做成上下两个目,但我们见到的主流双目都是做成左右的。在左右双目的相机中,我们可以把两个相机都看作针孔相机。它们是水平放置的,意味两个相机的光圈中心都位于x轴上。它们的距离称为双目相机的基线(Baseline,记作b),是双目的重要参数。
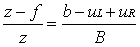
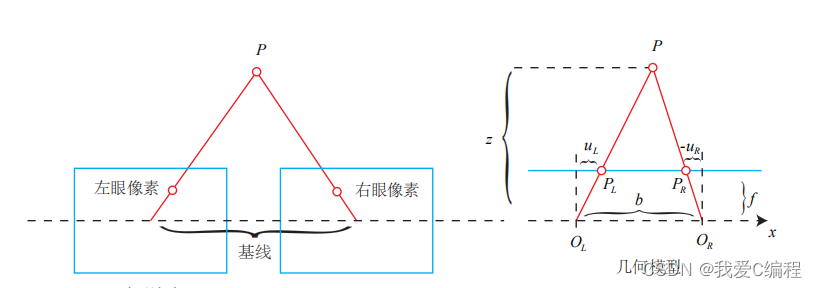 考虑一个空间点P,它在左眼和右眼各成一像,记作PL,PR。由于相机基线的存在,这两个成像位置是不同的。理想情况下,由于左右相机只有在x轴上有位移,因此 P的像也只在x轴(对应图像的u轴)上有差异。我们记它在左侧的坐标为uL,右侧坐标为uR。那么,它们的几何关系如图1右侧所示。根据三角形P−PL−PR和P−OL−OR 的相似关系,有:
考虑一个空间点P,它在左眼和右眼各成一像,记作PL,PR。由于相机基线的存在,这两个成像位置是不同的。理想情况下,由于左右相机只有在x轴上有位移,因此 P的像也只在x轴(对应图像的u轴)上有差异。我们记它在左侧的坐标为uL,右侧坐标为uR。那么,它们的几何关系如图1右侧所示。根据三角形P−PL−PR和P−OL−OR 的相似关系,有:
整理得:
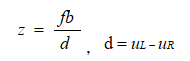
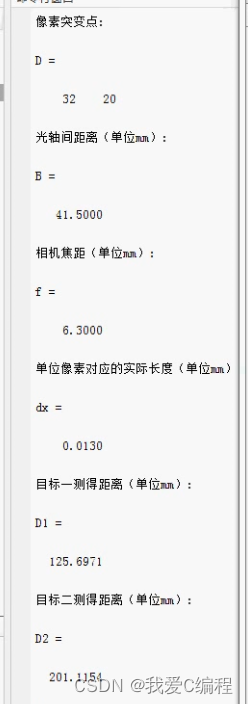
这里d为左右图的横坐标之差,称为视差(Disparity)。根据视差,我们可以估计一个像素离相机的距离。视差与距离成反比:视差越大,距离越近。同时,由于视差最小为一个像素,于是双目的深度存在一个理论上的最大值,由fb确定。我们看到,当基线越长时,双目最大能测到的距离就会变远;反之,小型双目器件则只能测量很近的距离。
基线:两个光心的连线称为基线;
极平面:物点(空间点M)与两个光心的连线构成的平面称为极平面;
极线:极平面与成像平面的交线
极点:极线的一端,基线与像平面的交点
像点:极线的一端,光心与物点连线与像平面的交点;
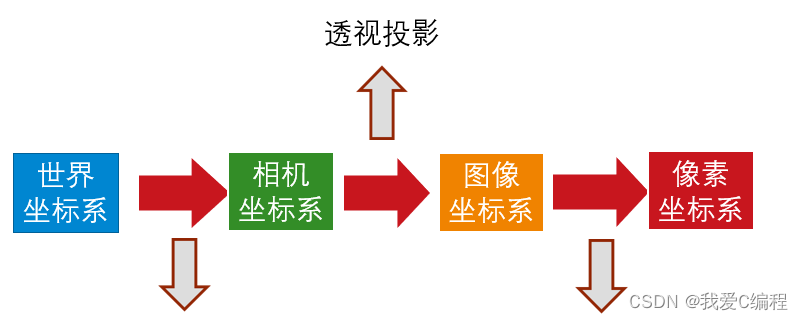
相机成像系统中,共包含四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。
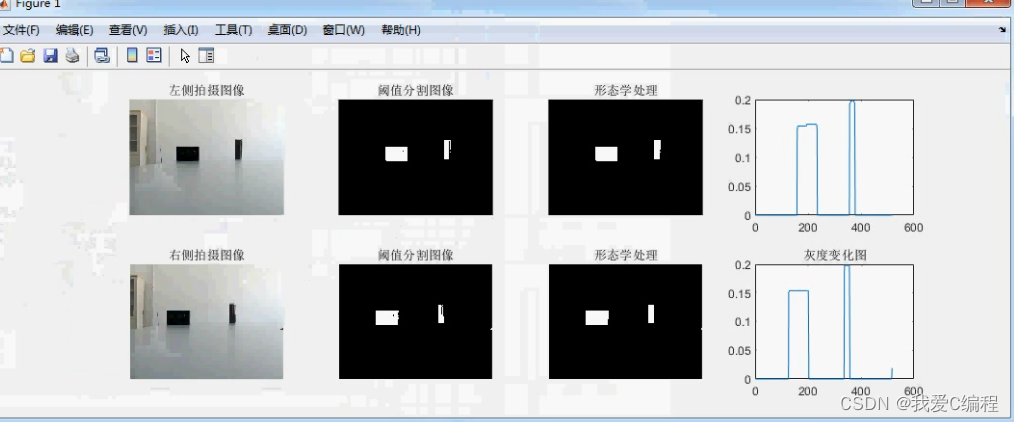
2.仿真效果预览 matlab2022a仿真结果如下:
3.MATLAB核心程序
PL=imread('IMAGES\p1.jpg');
subplot(241),imshow(PL),title('左侧拍摄图像');
PL=rgb2gray(PL);
PL=255-PL;
PL1=im2bw(PL,0.8);
subplot(242),imshow(PL1),title('阈值分割图像');
se1=strel('rectangle',[5 5]);
PL2=imclose(PL1,se1); %闭运算
se2=strel('rectangle',[5 5]);
PL3=imopen(PL2,se2); %开运算
subplot(243),imshow(PL2),title('形态学处理');
imwrite(PL3,'PL3.bmp','bmp')
k=1;sum1=0;
for j=1:518 %计算目标一的像素突变点
for i=1:388
sum1=sum1+PL3(i,j);
end
k=k+1;
P(k)=sum1/318;
sum1=0;
end
x=1:518;
y=P(x);
subplot(244),plot(x,y),title('灰度变化图');
plot(x,y);
for i=2:518 %计算目标二的像素突变点
if ((P(i-1)<0.01)&(P(i)>0.01)&(P(i)<0.16))
Z(1)=i;
continue
end
if ((P(i-1)<0.1)&(P(i)>0.16))
Z(2)=i;
continue
end
end
%===============================
%计算右边图像的目标位置
%===============================
PR=imread('IMAGES\p2.jpg');
subplot(245),imshow(PR);title('右侧拍摄图像');
PR=rgb2gray(PR);
PR=255-PR;
PR1=im2bw(PR,0.8);
subplot(246),imshow(PR1);title('阈值分割图像');
se1=strel('rectangle',[5 5]);
PR2=imclose(PR1,se1);
se2=strel('rectangle',[5 5]);
PR3=imopen(PR2,se2);
subplot(247),imshow(PR3),title('形态学处理');
k=1;sum2=0;
for j=1:518
for i=1:388
sum2=sum2+PR3(i,j);
end
k=k+1;
Q(k)=sum2/318;
sum2=0;
end
A59










