Openmv巡线
机器视觉巡线处理是参考openmv官方代码
Openmv官网源代码:book. openmv.cc/project/follow-lines.html
根据官网视频及教程将源码注入openmv中。

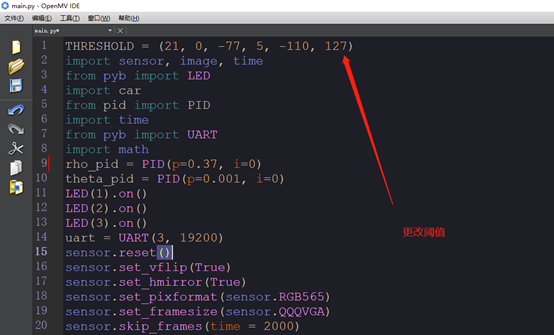
小车巡的是黑线,所以颜色阈值要更改。
颜色阈值获取方法
在文件示例中打开helloworld.py。
打开工具/机器视觉/阈值编辑器/缓冲区。
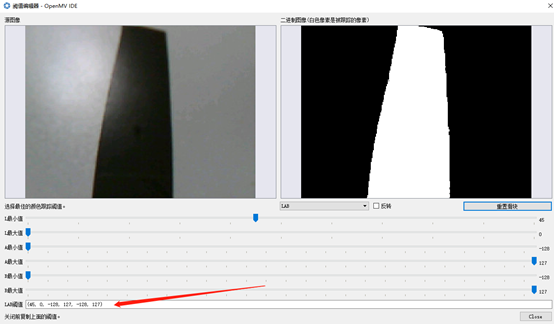
将我们需要寻迹的黑线调至全白,背景全黑即可,环境光亮度不同阈值也会不同,调好后将LAB阈值复制粘贴到openmv上就行。
对于openmv来说,引脚是已经配置好了,将小车和硬件搭好就可以驱动,但是我们是想利用STM32来驱动,所以要将数据通过串口发送给STM32。关于openmv底层驱动原理可以去官网找底层函数学习。
Openmv与STM32串口对接问题
重点在于如何将openmv与stm32进行串口通信,只要完成好这一步,后面的调试都会很容易。
经过调试,小车在黑线左右不同边的时候openmv算出来的output数值是有正负数的(例如右正左负)
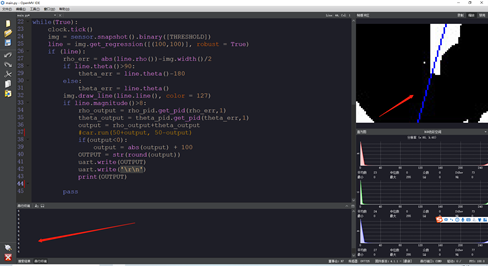
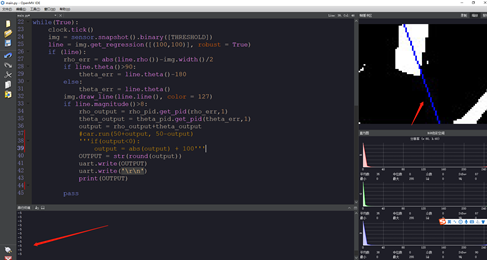
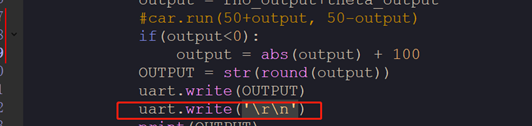
因为STM32不好处理负数,所以要将openmv计算出的负数值取绝对值+100,stm32通过判断其值是否大于100来判断其是否为负数。

STM32处理信息并驱动小车
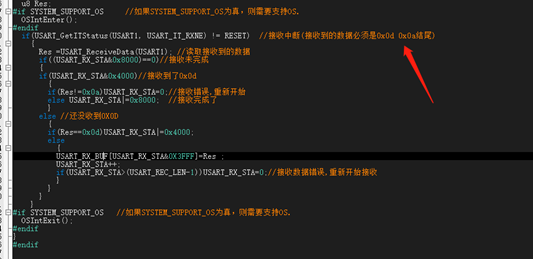
Stm32配置好串口波特率,与openmv相匹配,串口代码是移植正点原子的,这里的话要注意正点原子的字符接收必须是以0x0d、0x0a结尾(必须以回车换行为结束符),否则接收不了,所以要在openmv发送OUTPUT后加上发送回车换行。
STM32接收到串口数据后存储到了USART_RX_BUF数组中,然后再定义一个数组source将BUF数据转移过去。
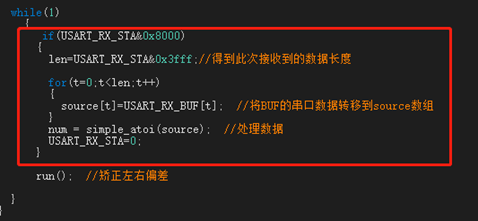
字符串转整形是C语言知识,网上百度也能找到相关代码,自己看着理解。
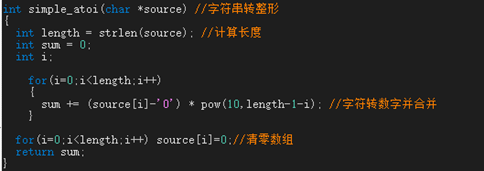
最后只需要将返回的sum放入电机控速的占空比中就可以修改速度了。

每辆车的电机转速、总量、电量等等因素都不一样,所以要调好巡线的话要在openmv中进行调整PID。
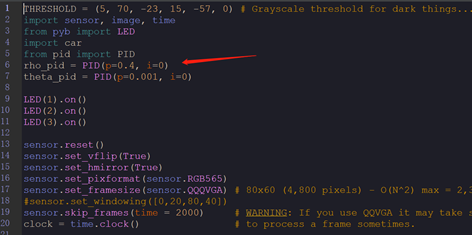
调节PID重点调节rhoPID的P参数就行了,下面的西塔PID可以不用更改。
偶然发现的良性BUG
在调试跑圆圈寻迹的时候,偶然发现了一个良性bug,可以很好地消除在寻迹过程中小车的过度摆动。
Bug是出现在STM32上的
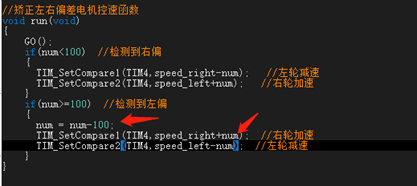
当时在处理左偏数据的时候我是用num-100再赋给num这个变量,然后再加到TIM控制PWM函数里面去,但是调试出来的结果是无论怎样都无法改变TIM两个通道的PWM参数,于是就出现了只能向一边偏的现象,刚开始我也没有矫正左右轮的速率,所以一开始给相同PWM在两个轮子上时会发送微小偏移现象,这两个因素下就造成小车只能往一个方向跑圆圈,但神奇的是小车跑的特别丝滑,可以查看视频文件夹中《完美跑圆圈》这个视频,但是在调openmv的PID时需要把rho的P参数调得比较大。
由此看来,在以后遇到圆圈寻迹的问题时不妨采用这种方式,让小车跑的更加丝滑!
反过来思考,openmv是只用到了一边PID矫正,另外一边是完全无效的,扩展到传统寻迹中(红外对管寻迹)是否可以只用一个红外对管完成圆圈寻迹?留个坑,以后再去验证。
文件链接:
Bai度网盘
链接:https://pan.baidu.com/s/1VQxNPwaIz4AvJ7nZEJ75FQ
提取码:5642










