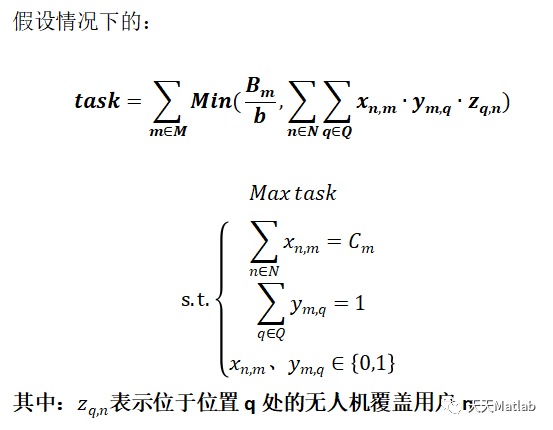
1 简介
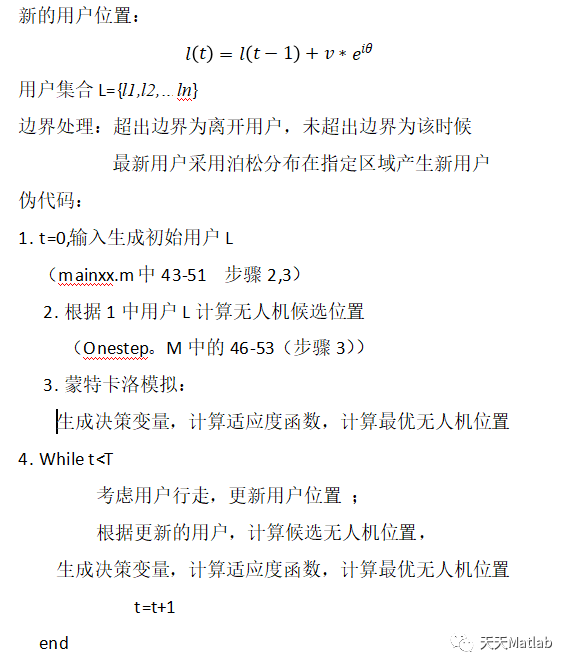
注意:所谓的实时分配指的是实时分配用户位置—根据实时分配的位置更新无人机的位置进而优化最优的分配任务
2 部分代码
clc
close all
clear all
disp('无人机优化模型')
%参数准备
%区域用户位置
d1=100; %区域A长度
d2=80; %区域A长度
N=30;%用户个数
C=6;%天线个数
bc=1;%电池损耗/每个内容---假设容量相等 电池消耗相同
Bm=[10 10 10];%无人机容量
%索引位置tuple={content k,UAV m,location q}
height=10;
h_max=20;
delta_d=0.5;%location interval
n1=3;%无人机个数
%discrete the location
%用户位置
%discrete the location
d1a=0:delta_d:d1;
d2a=0:delta_d:d2;
%离散位置
index=[];
for i=1:1:length(d1a)
for j=1:1:length(d2a)
index=[index;[d1a(i),d2a(j)]];
end
end
num_index=size(index,1);%number of location
%新增人群位置计算
%新增人群不可能出现位置
d1a1=[5,d1-5];
d2a1=[5,d2-5];
[len,~]=find((index(:,1)>=d1a1(1) & index(:,1)<=d1a1(2)) & (index(:,2)>=d2a1(1) & index(:,2)<=d2a1(2)));
id_new=setdiff(1:1:size(index,1),len'); %新增用户编号
new_candi=index(id_new',:);%新增人群位置
%随机生成用户
user_index=randperm(num_index,N);
user_location=[];
for i=1:1:length(user_index)
user_location=[user_location;index(user_index(i),:)];%%N*2
end
%仿真时间T
T=5;%仿真时间T
v=1;%用户行走速度
delta_p=2;%单位时间变化人数
theta_max=2*pi;%用户随机行走方向
best_uav=cell(1,T);
best_task=zeros(1,T);
[x_ind,task]=one_step(user_location,height,h_max,C,N,n1,bc,Bm); %主程序
best_uav{1,1}=x_ind;
best_task(1,1)=task;
old_ind=x_ind;%设置就得无人机位置
for t=2:1:T
%更新用户
new_user_location=[];
%考虑原始用户行走
for i=1:1:size(user_location,1)
user_location(i,1)=user_location(i,1)+v*cos(random('unif',0,theta_max));
user_location(i,2)=user_location(i,2)+v*sin(random('unif',0,theta_max));
%边界更新,如果超出边界 则认为用户离开
if (user_location(i,1)>d1) | (user_location(i,1)<0) | (user_location(i,2)<0)|(user_location(i,2)>d2)
continue;%用户离开不管
else
new_user_location=[new_user_location;user_location(i,:)]; %用户没离开保留
end
end
%当前时刻新来客户
num_new=random('poiss',delta_p);
if num_new==0
new_user_location=new_user_location;
else
new_id=randperm(length(id_new),num_new);
new_coming=new_candi(new_id',:);
new_user_location=[new_user_location; new_coming];
end
%用户个数更新
N=size(new_user_location,1);
%计算当前无人机位置
[x_ind,task]=one_step(new_user_location,height,h_max,C,N,n1,bc,Bm); %主程序
%无人机位置分配--中心服务器向无人机分配无人机更新位置
x_ind=allot_uav(x_ind,old_ind);
best_uav{1,t}=x_ind;
best_task(1,t)=task;
%我下一时刻用户位置更新
user_location=new_user_location;%上一时刻用户位置
old_ind=x_ind;
if mod(t,20)==0
figure,
plot(user_location(:,1),user_location(:,2),'r*')
xlabel('x')
ylabel('y')
title(num2str(t))
end
end
figure,plot(1:1:T,best_task,'->')
xlabel('T/(min)')
ylabel('Task/(n)')
grid on
ylim([0 40])
Q1=[];Q2=[];Q3=[];
for i=1:1:T
Q1=[Q1,(best_uav{1,i}(1,:))'];
Q2=[Q2,(best_uav{1,i}(2,:))'];
Q3=[Q3,(best_uav{1,i}(3,:))'];
end
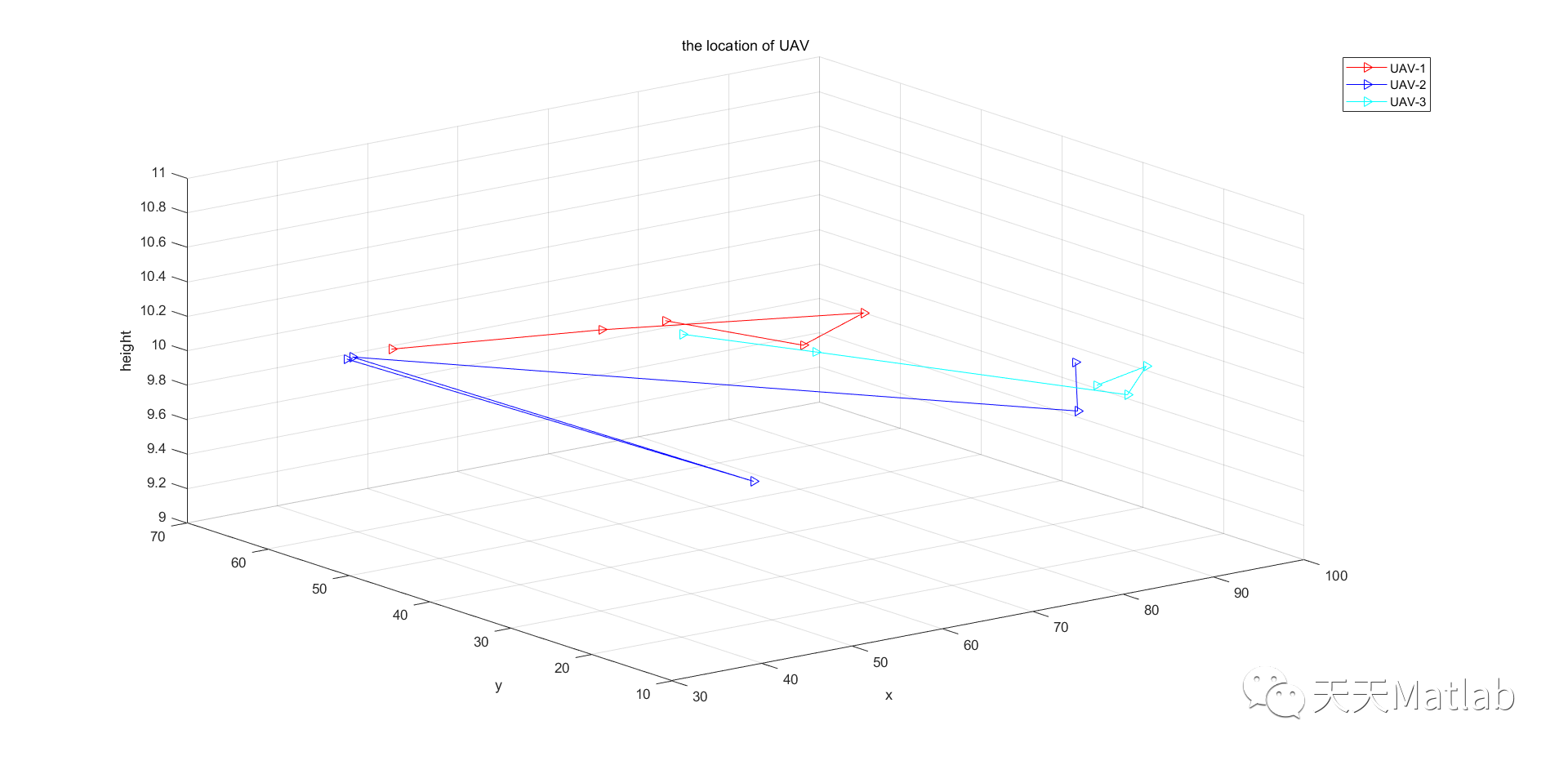
figure,
plot3(Q1(1,:),Q1(2,:),Q1(3,:),'r->')
hold on
plot3(Q2(1,:),Q2(2,:),Q2(3,:),'b->')
hold on
plot3(Q3(1,:),Q3(2,:),Q3(3,:),'c->')
xlabel('x')
ylabel('y')
zlabel('height')
grid on
legend('UAV-1','UAV-2','UAV-3')
title('the location of UAV')3 仿真结果
4 参考文献
[1]胡孟阳. 基于群智能算法的多无人机任务分配和协同路径规划.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。











