适用于ROS2 foxy/galactic/humble:
- ROS2机器人实验报告提示01➡入梦⬅
- ROS2机器人实验报告提示02➡沼泽⬅
- ROS2机器人实验报告提示03➡迷雾⬅
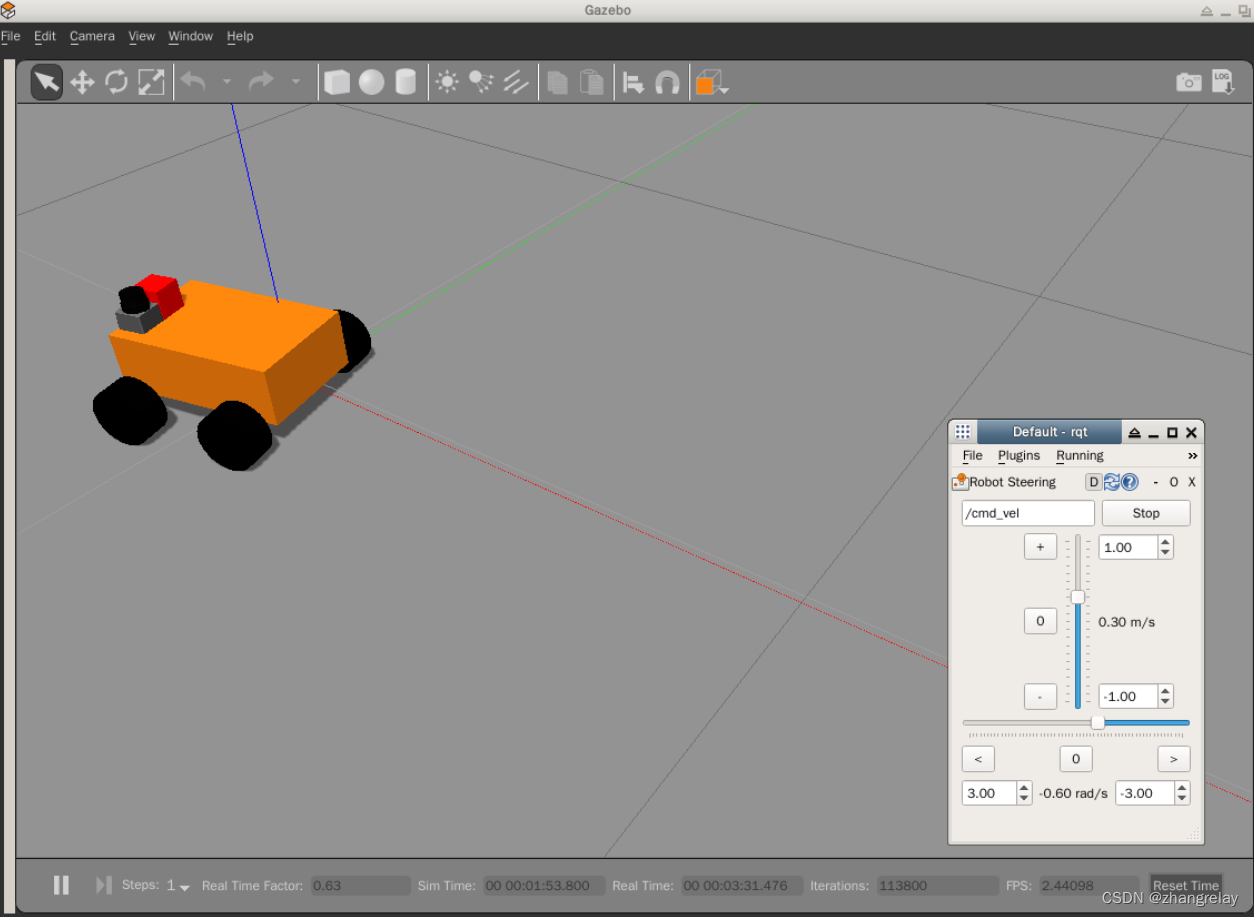
- ROS2机器人实验报告提示04➡开山⬅Nav2
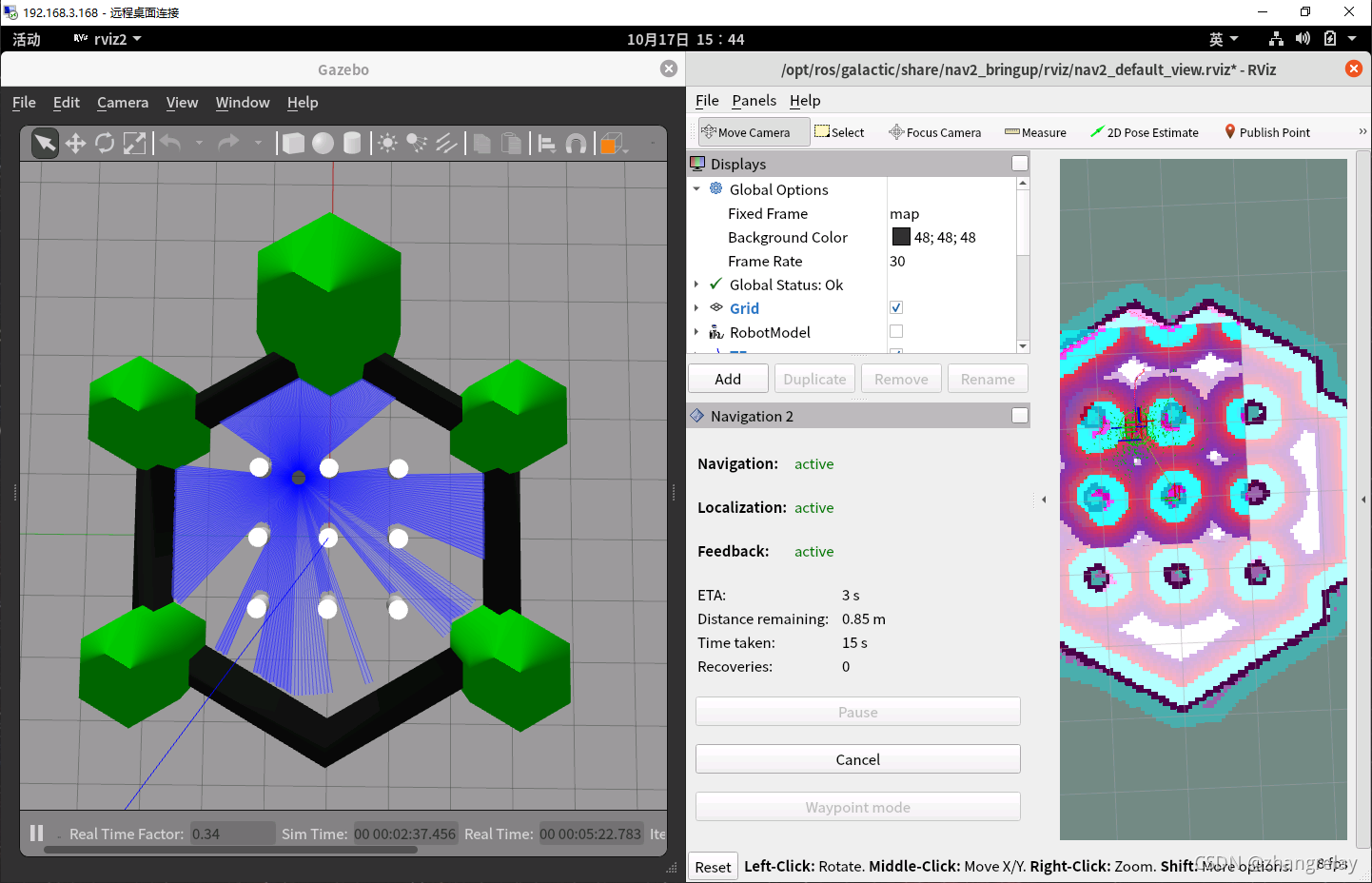
- ROS2机器人实验报告提示05➡寻路⬅Nav2
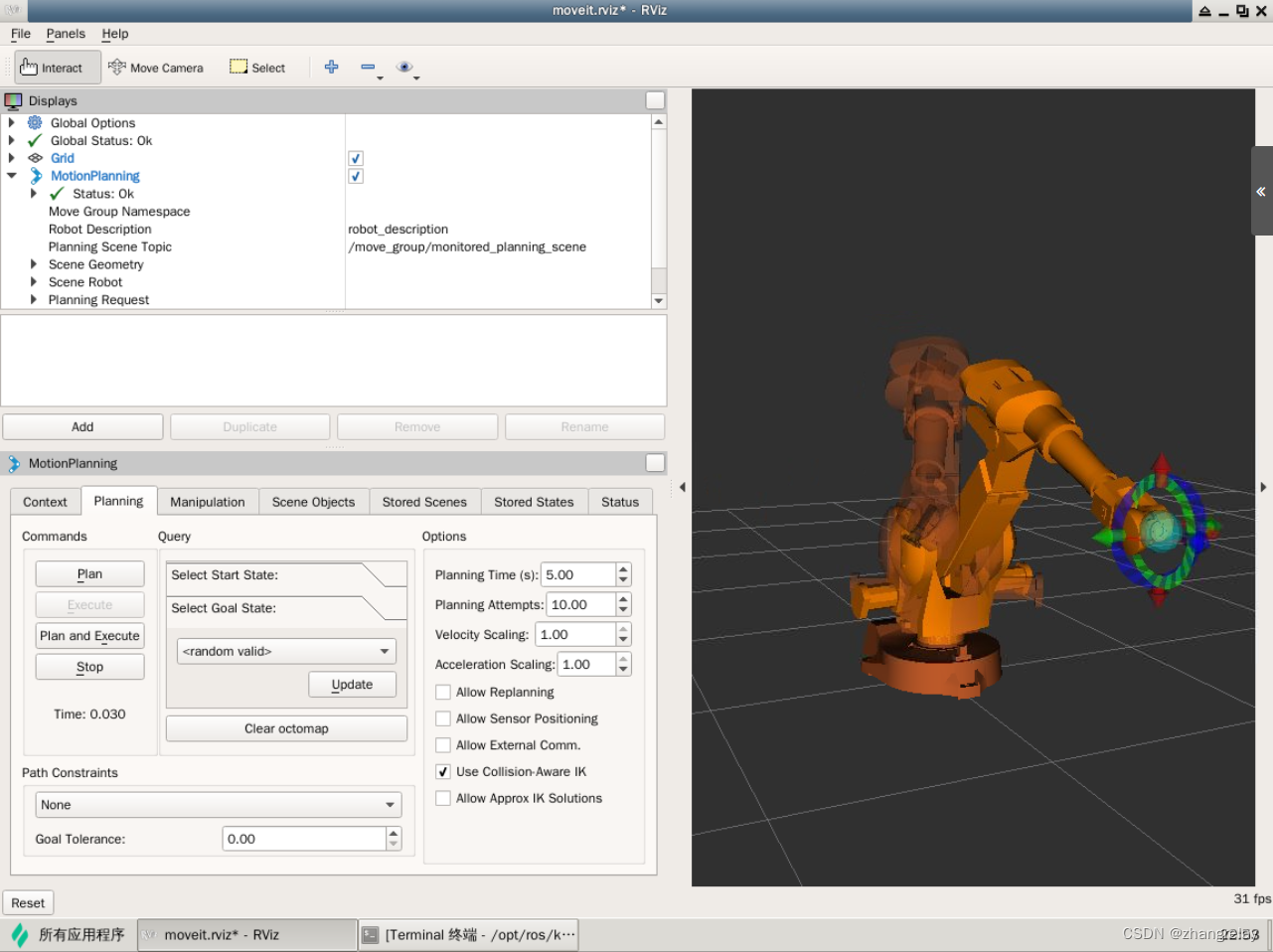
- ROS2机器人实验报告提示06➡抓阄⬅MoveIt2
- ROS2机器人实验报告提示07➡∞⬅
适用于ROS1 kinetic/melodic/noetic:
- 实验1 蓝桥ROS1机器人入门 适用kinetic/melodic/noetic
- 实验2 蓝桥ROS1架构与概念 适用kinetic/melodic/noetic
- 实验三 蓝桥ROS1可视化和调试工具 适用kinetic/melodic/noetic
- 实验四 蓝桥ROS1三维建模与仿真 适用kinetic/melodic/noetic
- 实验五 蓝桥ROS1导航功能 适用kinetic/melodic/noetic
- 实验6 蓝桥ROS1使用moveit 适用kinetic/melodic/noetic
- 实验7 蓝桥ROS1使用外设 适用kinetic/melodic/noetic
持续努力,徐徐前行
o_o ~ CSDN博客关注朋友突破2万 ~ +_+
蓝桥ROS课程维护情况说明 2017-2022
机器人操作系统二 ROS2:设计、架构和野外使用 - 机器翻译
全力推进加速到来的机器人时代 2022
-Fin-










