indigo/kinetic/melodic所支持的ROS机器人也非常多,数百种。如下只列出ROS1Noetic官方支持的。其他之前版本,通过源码改写都支持ROS1。
ROS2需要专用定制包,与ROS1可以桥接使用,不能直接支持。
奥迪R8:
Audibot Simulator 此存储库包含奥迪 R8 的 Gazebo 仿真模型。 它旨在成为一个非常灵活的仿真平台,支持单车和多车仿真。 要自定义模型,请在另一个 URDF 文件的 audibot_description 包中包含 audibot.urdf.xacro 并添加传感器、插件等。

Cob:


crane x7:

CRANE-X7 是一种机械臂,通过实际机器学习动力学。
采用7轴配置,可以利用大量轴进行规划避开障碍物,并像人的手臂一样进行灵活的运动。
diffbot:
DiffBot 是具有两个轮子的自主差动驱动机器人。 它的主要处理单元是运行 Ubuntu Mate 20.04 和 ROS 1 (ROS Noetic) 中间件的 Raspberry Pi 4 B。
dingo:
Dingo 是一个紧凑、轻便且具有成本效益的室内机器人平台,可扩展和可编程,旨在加速机器人研究和教育。 Dingo 提供两种驱动配置——差分驱动和全向驱动——使其适用于范围广泛的室内机器人应用,包括自主导航、移动操作和地图绘制。 其轻巧、紧凑的设计和随附的教程也使其成为课堂和实验室教学的理想选择。
franka:

husky:

Husky 是一款坚固耐用的户外无人地面车辆 (UGV),适用于研究和快速原型设计应用。 Husky 完全支持 ROS。
jackal:

Jackal 完全集成的防风雨设计在紧凑的封装中提供了独特的功能。 Jackal 在 IROS 2014 上亮相,并于 2014 年底开始发货。它一直在持续开发中,最新一代版本将在 2022 年继续发货。
khi:^_^
leo:

Mecanumbot :
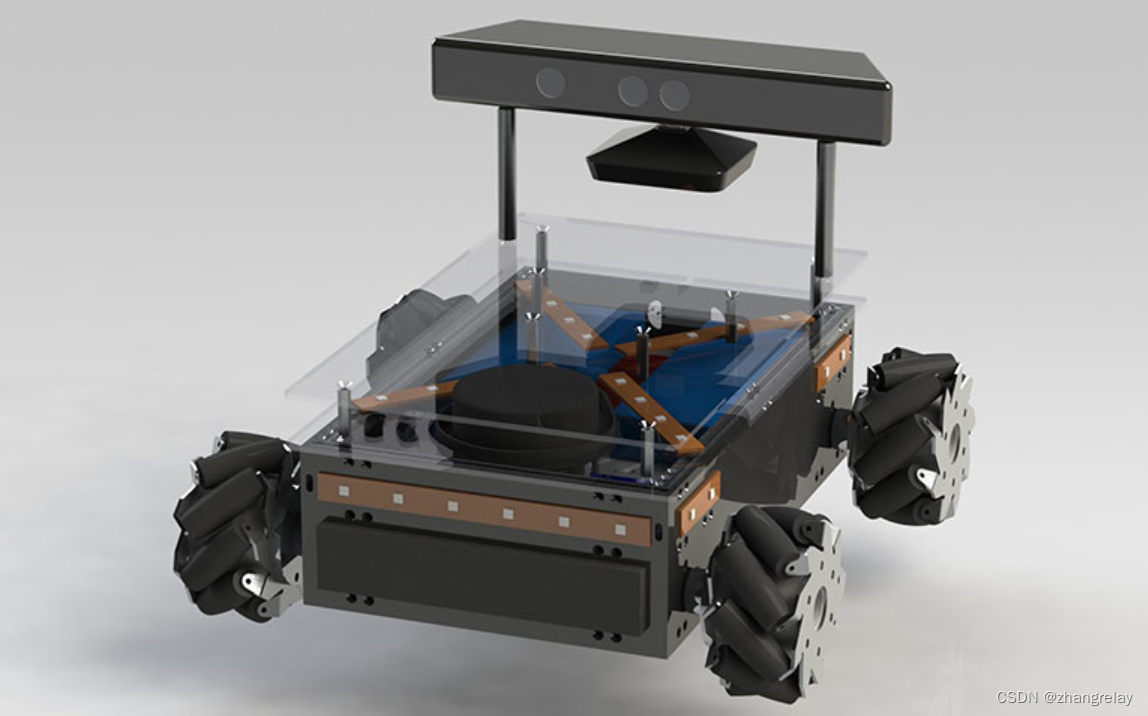
Mecanumbot 被设计为一个软件研究平台。 它具有高性能多核计算机、完整的移动底座、2D 激光扫描仪和 Microsoft Kinect。
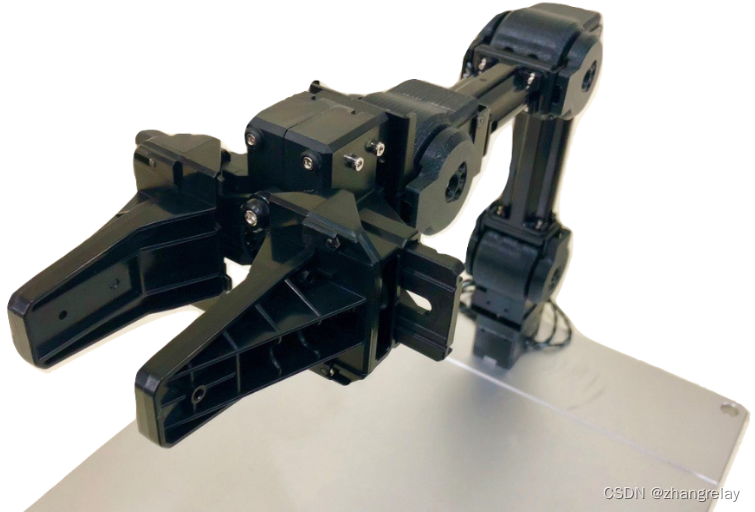
mia hand:

Mia 是一种机器人拟人化末端执行器,适用于:灵活的制造工厂、社交和/或类人协作机器人、生物自动化、人体工程学、假肢、人机界面研究,以及具有手部特征的抓手可能派上用场的任何地方 . 三个嵌入式电机允许与环境交互并使用动力、精确和横向抓取来抓取物体和工具。 嵌入式力传感器允许调节抓握力。 嵌入式功能和基于 RS-232 的简单控制接口可实现无缝集成,节省金钱和时间。 Mia 极其轻巧(约 500 克)但仍然强大(高达 70 N 的抓力),在灵活性和性能之间提供了良好的平衡。 由 Prensilia 设计和制造的 Mia 意大利制造,曾荣获 2019 年红点设计奖,并获得 2019 年 The Plan Award 荣誉奖。更多信息请参见 Mia 主页。
MiR:

open_manipulator :
支持 ROS 的 OpenManipulator 是一个完全开放的机器人平台,由 OpenSoftware、OpenHardware 和 OpenCR(嵌入式板)组成。 OpenManipulator 允许用户通过与 MoveIt 链接更轻松地控制。 此外,它与 TurtleBot3 具有完全的硬件兼容性。 即使没有真正的机器人,也可以在 Gazebo 模拟器中控制机器人。
pr2:

PR2 是由 Willow Garage 打造的移动操控平台。 PR2 软件系统完全用 ROS 编写。 因此,所有 PR2 功能都可以通过 ROS 接口使用。
如果使用的是 PR2,建议从 PR2 用户手册开始。 以下信息是为那些希望将 PR2 软件系统用作其他机器人模型的人提供的。
prbt:
qb device hand move:
^_^
Ridgeback:

Ridgeback 是一个中型室内机器人平台,它使用全向驱动器轻松移动机械手和重型有效载荷。 全向底座可在受限环境中提供精确定位,并与车载计算机、前后激光扫描仪和 IMU 完全集成。
RM:

RM系列机械手是一款高品质、低成本的超轻量仿人机械手。
5Kg负载条件下,机械手(内部集成控制器)重量仅为7.2kg,高达1:1.44的超高负载重量比,整臂最大直径11.4cm,人形手臂大小,普通工况下功率不超过22W,具有丰富的终端接口和控制器接口,满足多行业应用扩展的需要。同时,先进的控制算法使机器人具备了传统协作机器人的拖动示教、碰撞停止等功能。
* 超高负载自重比
超轻机身,机械臂(含控制器)自重仅7.2kg,有效载荷达5kg,载重比1:1.44,有效工作半径达610mm。
* 易于部署
超小尺寸,机械臂最大直径11.4CM,人形手臂尺寸,减少安装空间要求,更方便灵活。
* 超低功耗
24V直流供电,适用于移动电源,普通工况功率≦220W,可用于多种场景。
* 综合控制
无需传统控制柜,控制器与机械臂完美结合。
* 高兼容性
臂端通用接口,扩展灵活,即插即用,一体化机械手结构,接口丰富,满足多行业应用扩展需求。
* 系统开放
开放的API库支持C/C++编程语言,支持Windows/Linux/ROS机器人操作系统和多种通信协议。
* 安全灵活
拖拽编程,可完整再现拖拽轨迹;内置扭矩传感器,当碰撞达到最大扭矩时,机器人会及时停止,避免人员或设备受伤。
* 无线便携互联
智能终端可通过有线和无线连接控制机械臂,任意切换,方便快捷,摆脱控制线缆束缚。
* 模块化设计
一体化模块化设计,拆装方便,维护成本低,效率高。
Sciurus17:

Sciurus17 是一个 17DoF 上半身人形机器人,带有一个 3D 头部摄像头和一个 RGB 摄像头。
turtlebot3:
^_^
velo2cam:
大多数用于车载自主感知的传感器设置都由 LiDAR 和视觉系统组成,因为它们提供了补充信息,从而提高了获得强大场景理解所需的不同算法的可靠性。然而,有效使用来自不同来源的信息需要在所涉及的传感器之间进行准确校准,这通常意味着繁琐且繁重的过程。我们提出了一种方法来校准任何一对传感器的外部参数,这些传感器包括相同或不同模式的 LiDAR、单目或立体相机。该过程由两个阶段组成:首先,从要校准的传感器提供的数据中提取属于自定义校准目标的参考点,其次,通过两个点集的配准找到最佳刚性变换。所提出的方法可以处理具有非常不同的分辨率和姿势的设备,这通常在车辆设置中发现。为了评估所提出方法的性能,引入了一种建立在流行仿真框架之上的新型评估套件。在合成环境上的实验表明,我们的校准算法明显优于现有方法,而真实数据测试证实了评估套件中获得的结果。
warthog :

Warthog 是一种能够在陆地和水中行驶的大型全地形无人地面车辆。 它可以通过其坚固的构造、低地面压力和牵引轮胎来应对恶劣的环境,从而可以轻松地通过软土、植被、厚泥和陡坡。 有效载荷安装板和可访问的电源和通信端口使 Warthog 可以轻松定制传感器、机械手和其他有效载荷,以适应采矿、农业和环境监测中的各种机器人应用。
Warthog 的板载 PC 预装和配置了开源机器人操作系统 (ROS)。










